两天前,腾讯正式对外发布了其开发的首个软硬件全自研的多模态四足机器人,定名为机器狗Max。
这只狗和美国波士顿动力开发的四足机器人十分相似。但不同之外它是足轮一体式的,既可以像狗一样步态行走,也可以采用轮式滑行。
当前机器人(狗)移动能力研究,主要有两大主流方向:
足式:在复杂环境里,以足式为主,像足类动物一样可以跑、跳、翻越障碍,需要适应复杂的地形和环境。
轮式:在城市里,接触的主要是平坦道路,这个时候可以滑行的轮式机器人就更有优势。
而将两种移动能力结合,腾讯将这种设计称之为足轮融合一体式设计。
机器狗Max采用了腾讯Robotics X实验室原创自研的足轮融合方案,也就是有腿又有轮。
在不同的环境,可以切换不同的形态模式。

足式Max,在崎岖路面走得稳。
轮式Max,平坦路面跑得快。
这种特殊的轮式结构,将机器狗轮式运动的速度提升数倍,最高可达25km/h。
多项全能,算法控制出众平衡感
这只狗依托于腾讯自研的软硬件系统框架,拥有敏锐的“神经系统”,实现了亚毫秒级力控,大大降低了软硬件系统延迟。
而且Max还延续了“大狗狗”Jamoca的鲁棒控制算法,让Max拥有发达的“小脑”,和优秀的平衡能力。
所以它还可以跳得高!
Max最高起跳高度为50cm,同时立得稳。
Max综合了NLMPC(Nonlinear Model Predictive Control,非线性模型预测控制)算法、QP(Quadratic Programming)优化、柔顺控制算法,完成了从趴地状态到双轮站立的起摆、平衡抗扰、落地收腿控制。
▲Max首次实现了四足到双轮站立演示
▲Max平衡抗扰演示
与波士顿动力不相上下的翻跟头能力也很出色。
在摔倒之后可以翻转,自我重立。

▲Max正在训练摔倒后爬起
Max基于自研的鲁棒控制算法,实现平均计算耗时小于0.3ms,拥有摔倒自行恢复的技能,即使遭受大冲击摔倒,也能自行恢复正常运行状态。
另外,Max的设计也十分惊艳。
它的躯干采用镂空梁设计,腿部采用类肌肉的曲面造型。线条感强、运动力足。

未来这款机器人有望在机器人巡逻、安保、救援等领域发挥作用,成为人类的智能伙伴和生活助手。
▲正在拜年的Max
这里有必要问一句,什么是Jamoca的鲁棒控制算法? Jamoca是腾讯开发的第一代四足机器人,这两代机器人均来自腾讯 Robotics X 实验室。
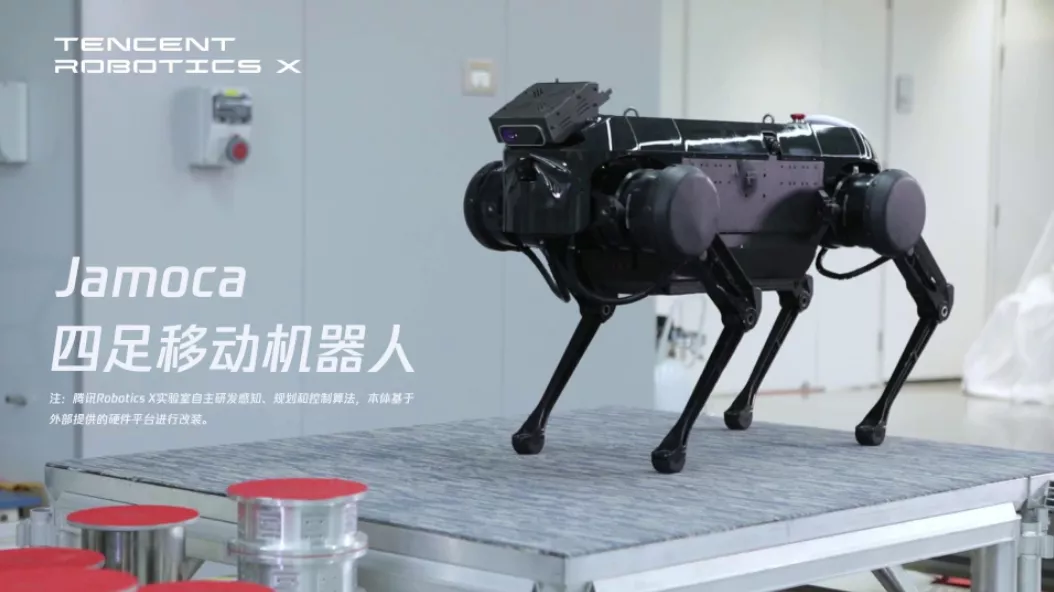
▲Jamoca比起Max颜值上要差一些。
Jamoca最为惊艳的一点是首个可以梅花桩行走的机器人。今天Max的诸多能力都是继承自Jamoca。
下面我们就简要介绍一下Jamoca和腾讯 Robotics X 实验室。
这家实验室成立于2018年,致力推进人机协作的下一代机器人研究,打造虚拟世界到真实世界的载体与连接器。
目前实验室主攻移动、灵巧操作和智能体等三大通用机器人技术的研究与应用,并聚焦于多模态移动机器人的研发。
腾讯 Robotics X 与腾讯 AI Lab 实验室主任张正友博士表示:“移动或运动能力,是机器人最核心、也是最基本的能力之一,决定了它能去到什么场景,做什么事情,未来有什么样的想象力。我们很高兴能看到这两项进展,并将继续深入探索机器人的通用能力,为虚拟到真实世界搭建一个有力的桥梁。”
在精准环境感知方面,Jamoca 创新性地实现了鲁棒的眼脚标定,并利用RGB-D相机对周围环境进行实时的感知。
通过特征点匹配的方式,对 Jamoca 自身的运动轨迹进行在线跟踪,并将基于视觉的定位信息与基于运动学的里程计信息和 IMU(Inertial measurement unit,惯性测量单元) 数据进行融合,提高了定位追踪的精度和频率。同时利用算法识别和提取出台阶和梅花桩的表面区域范围和中心点位置,将定位和识别的数据进行融合,从而重建出整个三维运动场景。
在最优运动线路规划和实时的运动控制方面,Jamoca 基于感知系统实时感知到的机器人本体及梅花桩位置信息,基于质心动力学,实现在线的质心轨迹生成和落脚点规划。在保证机器人的四条腿可以安全地踏到下一步的梅花桩的同时,优化出一条本体移动长度最短、综合耗力最小的运动轨迹,并且可以在线持续地进行上述运动规划。
同时,基于实时的本体状态估计,Jamoca 能够结合质心动力学模型来构建优化问题,实时求解机器人足端所需的地面反作用力,并结合反馈控制实现精准鲁棒的实时力控,可完成行走、对角小跑以及跳跃等的运动控制。
不同于预先设计好规则之后做重复的运动的工业机器人,Robotics X 实验室更关注机器人有意识、有判断的自主特性研究,目的就是要在有很大不确定性的动态环境里,能够实现机器人的自主判断、自主决策,并自主完成任务。
最初,Jamoca 主要用于实验室内部科研实验。它的在线环境感知、最优运动规划和实时运动控制等能力,未来将帮助腾讯其他机器人产品更好地适应复杂的现实环境。
在这两只狗之外,腾讯 Robotics X 实验室还推出过一款静止、行进均能自主保持平衡的轮式机器人,也可称之为自平衡自行车,是腾讯 Robotics X 实验室的首个整机自研机器人。
它在传统轮式移动机器人的基础上,增加了动量轮及其电机驱动系统,使得机器人可以在静止及行进状态下均保持平衡不倒。
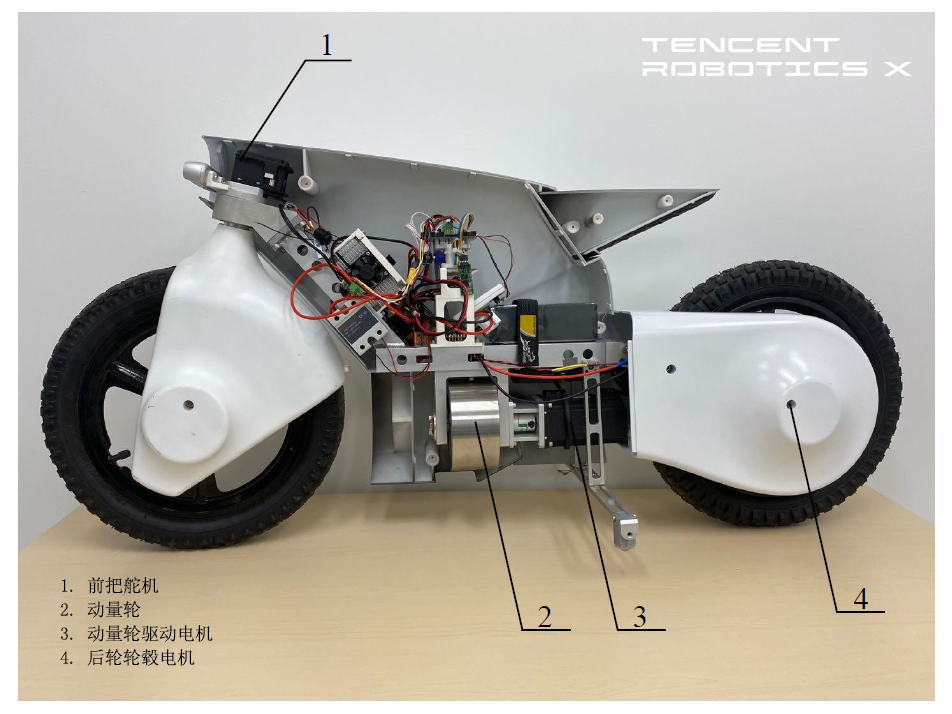
这厌自平衡轮式移动机器人的硬件平台完全由腾讯Robotics X自研,重约15公斤,长1.15米,高0.52米。
它的控制可以细分为行进中的动态自平衡和停止行进时的静态自平衡。行进中的动态自平衡是依靠前把转动进而带动车身的转动实现;停止行进时的静态自平衡则采用动量轮力矩平衡技术,应用角动量守恒的原理实现自平衡控制。

依靠平衡算法,即使受到一定的外界干扰,自平衡轮式移动机器人仍然可以在保持自平衡状态的同时,实现平稳地向前行驶。

机器人在不同的路面状况下,例如遇到上下坡时,均表现出了较好的运动能力和平衡性能。甚至对于行驶路径上存在特定约束的情况,比如沿着独木桥行驶的场景,它也能从容应对。
近两年我们时常被波士顿动力机器人跳舞、被击打、翻跟斗等视频惊吓,在看到这两款机器人之后,是不是对中国人在这一领域的成果也有几分信心呢?
在此前举行的机器人行业国际顶会IROS 2020上,腾讯 Robotics X 实验室发布的两篇平衡控制方向的Oral论文,就来自于该机器人项目。
IROS由IEEE(电气和电子工程师协会)和RSJ(日本机器人学会)共同举办,是机器人领域三大国际顶级会议之一。
在第一项研究《自平衡轮式移动机器人的非线性平衡控制:设计与实验》中,腾讯 Robotics X 实验室与纽约大学合作研究了轮式机器人的动静态平衡控制的稳定性问题。
在传统轮式移动机器人的基础上,腾讯 Robotics X 实验室增加了动量轮和电机驱动系统,使用了级联与阻尼配置的无源控制方法(Interconnection and Damping Assignment - Passivity Based Control, IDA-PBC),并应用李雅普诺夫理论从理论上证明了自平衡轮式移动机器人的闭环系统稳定性。
此外,实验室还在自建平台上证明了新控制器效果良好,能让机器人保持自平衡,并有一定的抗外界干扰能力。
而在另一项研究《自平衡轮式移动机器人平衡的增益规划控制器设计》中,不同于传统方法将静态和动态平衡区分对待,研究团队建立了可以同时描述轮式移动机器人动态特性和静态特性的统一的数学模型。

基于同一个模型,动态平衡和静态平衡对不同驱动输入的依赖程度不同,无法使用同样的控制参数。因此,研究团队使用基于增益规划(Gain Scheduling)的控制方法。该控制方法可在两种情况下都保持轮式机器人的平衡,这一点在理论和实验中都得到证明。
是不是也很酷?

x

-
 限时10.98万元起售,传祺GS4 MAX上市 2024-04-18 23:46
限时10.98万元起售,传祺GS4 MAX上市 2024-04-18 23:46 -
 新能源序列“风行星海”发布,首款MPV星海V9开启预售 2024-04-18 23:32
新能源序列“风行星海”发布,首款MPV星海V9开启预售 2024-04-18 23:32 -
 再投25亿欧元,加大本土化研发,大众集团启动入华40周年庆祝活动 2024-04-12 00:25
再投25亿欧元,加大本土化研发,大众集团启动入华40周年庆祝活动 2024-04-12 00:25
-
新能源序列“风行星海”发布,首款MPV星海V9开启预售 2024-04-18 23:32
-
限时10.98万元起售,传祺GS4 MAX上市 2024-04-18 23:46
-
 商汤绝影将于北京车展发布端到端自动驾驶解决方案UniAD 2024-04-19 11:20
商汤绝影将于北京车展发布端到端自动驾驶解决方案UniAD 2024-04-19 11:20

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
