
这是一个高阶智能驾驶辅助系统扎堆落地的季节。而其中,飞凡的RISING PILOT可以说给了不小的惊喜。
9月5日,飞凡智驾团队在媒体小课堂上详细解读了其RISING PILOT全融合高阶智驾系统。那么,RISING PILOT有哪些和其他高阶智驾系统不同的地方?它的惊喜又表现在哪些地方?
据介绍,目前飞凡RISING PILOT已经历40万公里的超长距离严苛测试,可覆盖中国智驾环境的高风险场景,实现预知行人、车辆等交通参与者的行为和轨迹。
具体来看,在以下多个目前大部分智驾系统较难处理的场景下,RISING PILOT都能有很好的表现。
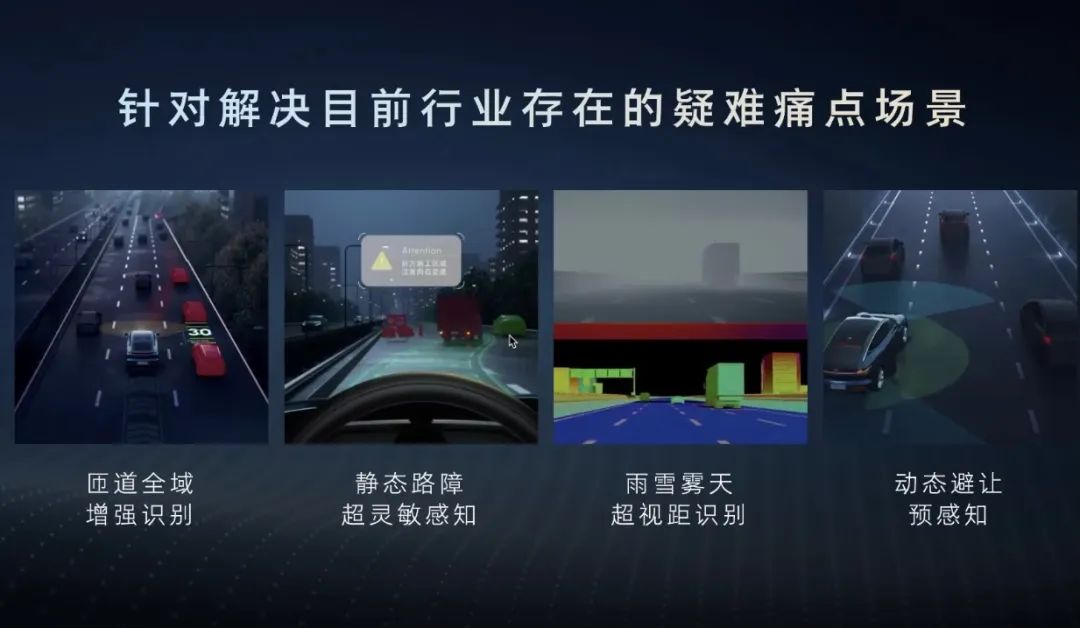
例如,在高速道路上进入匝道时,RISING PILOT可提前识别匝道三角区域,提前进行变道准备。同时系统还能实时识别前后车辆的行驶状态与趋势等周围路况,在安全范围内实现变道,并与前后车共同汇入匝道。
在遇到施工区域类场景时,RISING PILOT可识别静态障碍物的三维几何位置、尺寸和类型,即便只有雪糕筒或施工提示牌也可提前精准识别,并通过预测和决策模型,快速反应提前避让。
如果旁边车道有其他车辆,RISING PILOT还可实现先主动减速,待原车道上车开走后再换道避让。

面对高速上的变道场景,当道路上其他车辆同时变道且可能发生冲突时,RISING PILOT系统会采取保守的安全策略,保持与周围车辆的安全距离,让冲突车辆先行,随后再完成变道等动作。
此外,RISING PILOT还具备可自主调节功能的MY PILOT模式。用户可在RISING OS系统中选择舒适、标准、运动等多种智驾模式,实现不同风格的行为决策。
例如在车辆较多且车辆行驶普遍较快的高速路场景,安全的权重增加,选择舒适模式,可减少变道行为。
而在光线较好且车辆较少的高速路场景时,效率的权重增加,可在保证安全的前提下增加变道超车等。
这些能力一定程度展现了RISING PILOT更加智能的决策能力。
那么,RISING PLIOT是如何实现这些功能的?
智驾网将从硬件、算法等方面进行详细解读。
01.
激光雷达、4D毫米波雷达齐上车
首先,从硬件方面来看,RISING PILOT搭载33个传感硬件,包括2颗采埃孚的Premium 4D成像雷达,1颗LUMINAR 1550 nm激光雷达,12颗高清摄像头,飞凡称其为三张ACE。此外,还包括4颗增强版远距离点云角雷达,12颗超声波雷达,以及高精地图和DMS系统。

Premium 4D成像雷达为国内首发量产。相较于传统毫米波雷达,4D雷达除能感知目标物的距离、速度、水平方位角外,还可感知物体垂直高度,从而提升对静态障碍物的检测率,并对其进行分类,提升功能安全。
对静态障碍物的检测可以说是目前智能驾驶辅助系统普遍的一个痛点,特斯拉的多起辅助驾驶事故就因无法识别静态障碍物而起。而4D毫米波雷达的上车或将能解决这个问题。
此外,相较于普通毫米波雷达210m的探测距离,Premium 4D成像雷达探测距离可达350m,且探测精度更高。
而且,由于4D成像雷达通过电磁波实现感知,因而在大雾、大雪、大雨,甚至驾驶员本身都难以评判路况时,仍可正常运作。
此外,4D成像雷达可产生类似激光雷达的“点云”。对于每个点,不仅可知道X、Y和Z,还可以直接得到速度值,并持续跟踪这些数据的改变。
4D毫米波雷达点云可以直接成像,且具备超高分辨率,配合机器学习算法可以有效解析目标的轮廓、类别等,并且支持点云和目标同步输出,为融合提供丰富、同源的精细信息。
激光雷达方面,RISING PILOT使用了LUMINAR的1550nm激光雷达。激光雷达可补足视觉方案受光线影响较大,毫米波雷达探测轮廓准确性不足的问题,使探测更加精准。
LUMINAR 1550nm激光雷达采用MEMS技术路线,FOV(视场角)120°x 25°,在10%反射率下具有250m的探测距离,比一般激光雷达看得更远。
而且,1550nm的激光波长相较目前大部分激光雷达采用的905nm波长对人眼更加安全。在当前上车的激光雷达产品中,只有蔚来的图达通同样采用了1550nm波长的激光。
摄像头方面,系统搭载的12颗高清摄像头可全方位360度覆盖车身,包括3个前向800万像素摄像头,1个后向800万像素摄像头,4个300万像素周视摄像头和4个300万像素环视摄像头,能更好地识别视觉信息。
同时,RISING PILOT采用2颗英伟达Orin 芯片,7nm工艺制程,单颗算力254 TOPS,为发挥强大的算法打下了基础。

此外,RISING PILOT搭载高带宽、低延时的千兆以太网主干通信,主要采用4路千兆以太网+9路百兆以太网组合,单线数据传输速度达到传统CAN总线的2000倍。与英伟达Orin X芯片及全融合算法配合,可在毫秒级内,完成感知、计算、决策、执行等一整套应急反应。
02.
全融合算法判断更准确
RISING PILOT的Full Fusion全融合算法是对前融合与后融合的探测结果进行综合,可实现更快速、更准确的判断趋势。
后融合指的是不同的传感器各司其职,摄像头、毫米波雷达、激光雷达等分别通过不同的算法进行独立感知,完成识别后生成独立的信息。
后融合的弊端是单一类型的传感器因自身能力限制,在特定条件下可能发生漏检或误检。
例如视觉传感器可根据颜色、纹理、标识线、交通指示信息等视觉信息来判断物体的类型,但不擅长判断距离和位置。毫米波雷达则更擅长判断距离、速度、角度等,而不擅长判断颜色和识别纹理,也不能识别文字信息。
因此,不同类型传感器的识别结果需要互相验证,才能达到更高的置信度。
前融合则是指所有传感器基于多任务神经网络算法,将来自激光雷达、摄像头和毫米波雷达等不同传感器的原始数据统一处理,通过复杂的超级AI算法来完成整个感知过程。
其弊端是由于前融合对不同类型源数据的时效性要求高,也就对硬件算力有了更高的要求。另一方面,神经网络有极低的概率会出现误判或失误,需要冗余的系统进行验证。

RISING PILOT则是将前融合与后融合两个过程同步进行,对视觉、毫米波、激光雷达独立的感知结果进行后融合,同时综合激光雷达和毫米波雷达与视觉系统的前融合结果进行融合。
简单而言,Full Fusion全融合算法是后融合+前融合+混合融合算法的三重融合,因而可以获得更快速、更准确的趋势判断。
据飞凡智驾团队介绍,这套系统将于10月随飞凡R7一起上市。从硬件层面来看,可以说,RISING PILOT确实是把目前能用的智能驾驶硬件全部用上了,因而也有人认为飞凡是在“堆料”。

不过从目前飞凡公布的性能来看,这些料确实也没有白堆。搭配全融合的算法,可实现更聪明的智驾系统。
至于这套系统具体真实表现如何,还有待最终量产落地的验证。

x

-
汽车供应链企业正在崛起 2023-11-22 19:44
-
 Stellantis集团将投资15亿欧元成为零跑汽车的战略股东 2023-10-26 08:47
Stellantis集团将投资15亿欧元成为零跑汽车的战略股东 2023-10-26 08:47 -
大模型重塑百度智驾:落地首个纯视觉城市NOA,首款舱驾融合产品来了 2023-10-18 14:30


-
 英特尔宣布成立全新独立运营的FPGA公司——Altera 2024-03-01 12:47
英特尔宣布成立全新独立运营的FPGA公司——Altera 2024-03-01 12:47 -
 哪吒汽车 All In AI,携手360集团推进大模型产品NETA GPT 上车 2024-03-01 17:21
哪吒汽车 All In AI,携手360集团推进大模型产品NETA GPT 上车 2024-03-01 17:21 -
 15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00
15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
