
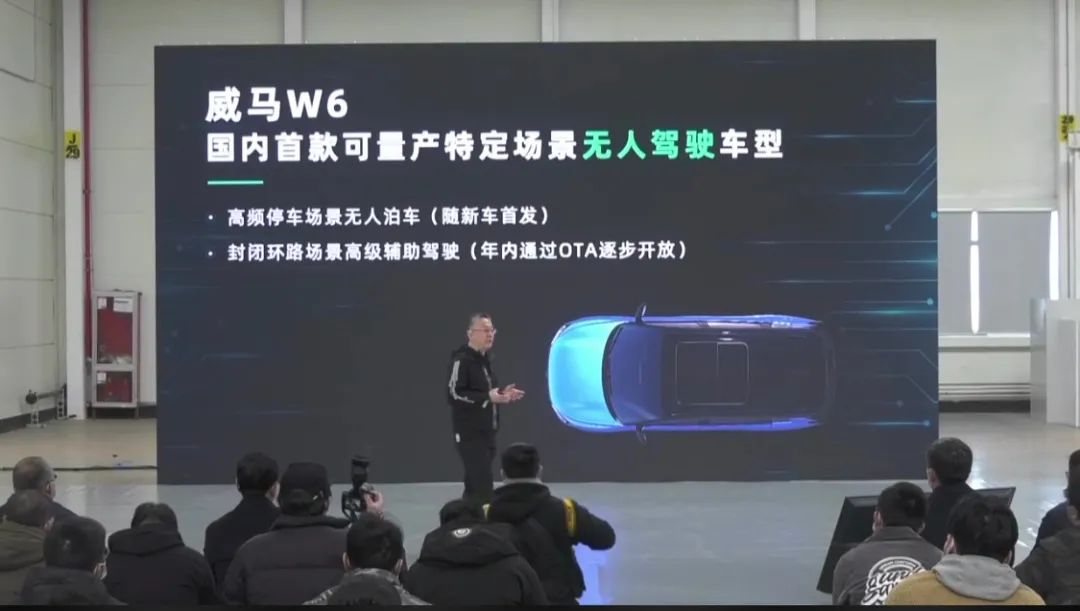
威马第三款SUV来了。
今天(1月19日),在湖北黄冈星晖工厂具备感知力、智能化、自我进化力三方面达到了全新高度的威马W6下线,新车将在今年上海车展正式交付。
与传统的下线仪式不同,威马W6从生产线驶到仪式现场的全程并没有人员在车内驾驶,从识别路线到避让障碍物最终准确登台,全部动作均由车辆自动完成,这是国内首款量产的具备无人驾驶功能的智能电动车型。
在下线仪式上,威马汽车创始人、董事长兼CEO沈晖介绍了威马2021年四大技术方向:

2021年布局换电技术;
2021年底发布轿车车型,新车续航里程超800公里;
固态电池持续推进;
热管理系统升级。
同时,他还表示,“新平台在开发中,目标是在智能化、感知力和进化力在三方面超越同时期特斯拉。”
他还预计,“未来五年新能源汽车销量占比5-20%的过程中,10-25万元区间更有机会。”

威马W6作为一款可自主泊车的全新SUV,新车在电子电气架构、网关、域控制器、语音交互、场景化体验等方面采用全新设计。
硬件层面,W6搭载了首款7纳米制程车规级高通8155芯片、5G基带以及威马汽车自研的自动驾驶域控制器,在软件定义硬件的趋势下,威马W6可实现更强大的OTA升级能力。
此外,W6的车机网关引入了双操作系统备份机制的冗余设计,当系统在后台OTA升级时,车辆仍可正常驾驶,所有的更新都在后台自行完成,对车辆的正常使用毫无干扰,避免了升级过程中的安全隐患。
据沈晖介绍,“威马W6借助百度Apollo平台的百万级云算力,实现了高频停车场景下的无人驾驶能力。未来,威马将联合百度Apollo延展更多场景,包括开放道路下的高级辅助驾驶等功能,有望在2021年通过OTA的方式与用户见面。”
可以想象这样的场景:用户只需要把车辆停在停车场的入口,车会在无人状态下自动驶入停车场内,寻找并泊入可停靠的车位。

驶出停车场也同样便捷,只需手机远程一键式操作,车辆依然会在无人状态下自动驶出停车场,安全停到用户的面前。
对此,智驾君在第一时间在北京华润五彩城体验了W6的自主泊车系统。
这一次全新的停车体验。
作为百度Apollo Valet Parking落地的第一个场地,华润五彩城位于海淀商业繁华地段,其停车场人流量与车流量是对威马自主泊车技术的一大考验。
先简单介绍一下传感器配置,威马W6都是前装量产传感器方案,全车部署了24个传感器,包含5个77GHz毫米波雷达、7个摄像头及12个超声波雷达。
对于传感器硬件来说,这些都是可量产的传感器组合,价格可控制在千元级别,其中某些具备L2级别的自动驾驶汽车已实现部分硬件标配。

值得一提的是,自主泊车所有功能都集成在威马中控显示屏之中,车主可根据系统提示进行一系列操作,整个操作过程非常简单,无需多次学习。
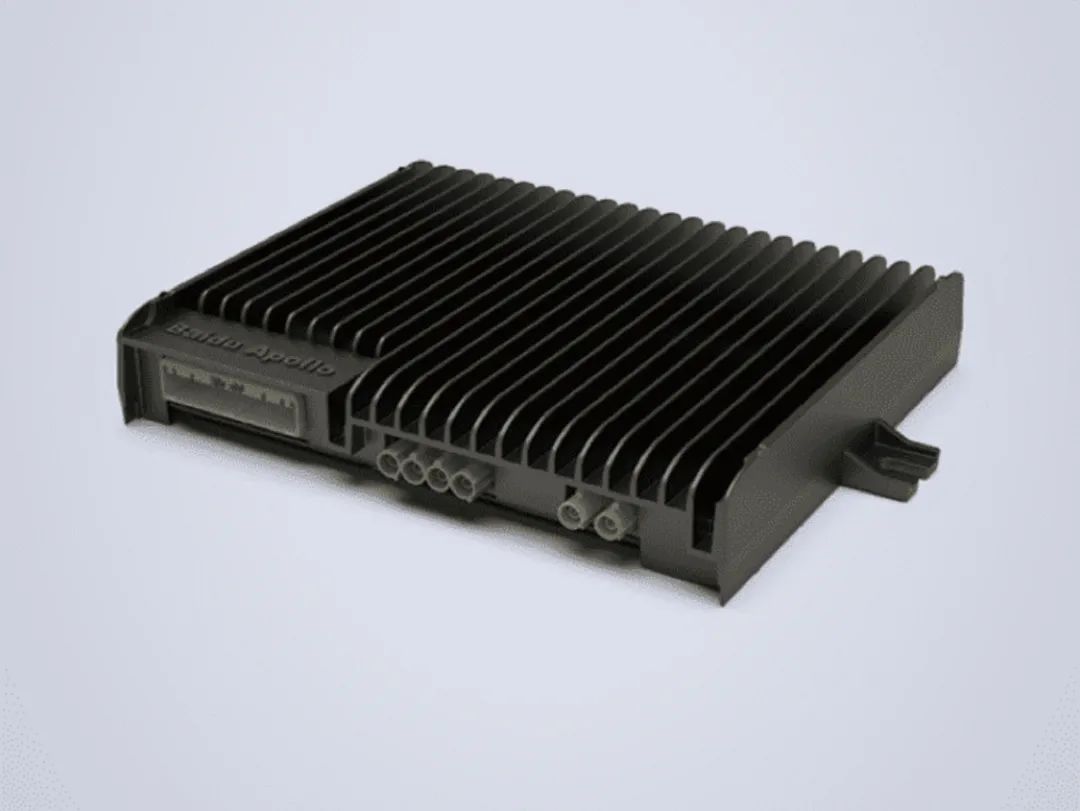
对于计算单元,百度提供了自研的AD计算平台ACU,该计算平台是全球首个量产泊车域自动驾驶计算单元,其特点为:
全面部署AUTOSAR全车规基础软件开发。
硬件安全岛设计达到功能安全最高等级ASIL-D。
100%全车规元器件,抗冲击振动,电磁干扰,全面胜任车载环境。
设计流程,供应链和生产管控基于IATF1649质量管理体系。
为了完整体验百度的自主泊车功能,这次体验在两辆车上分别体验HAVP和PAVP功能。
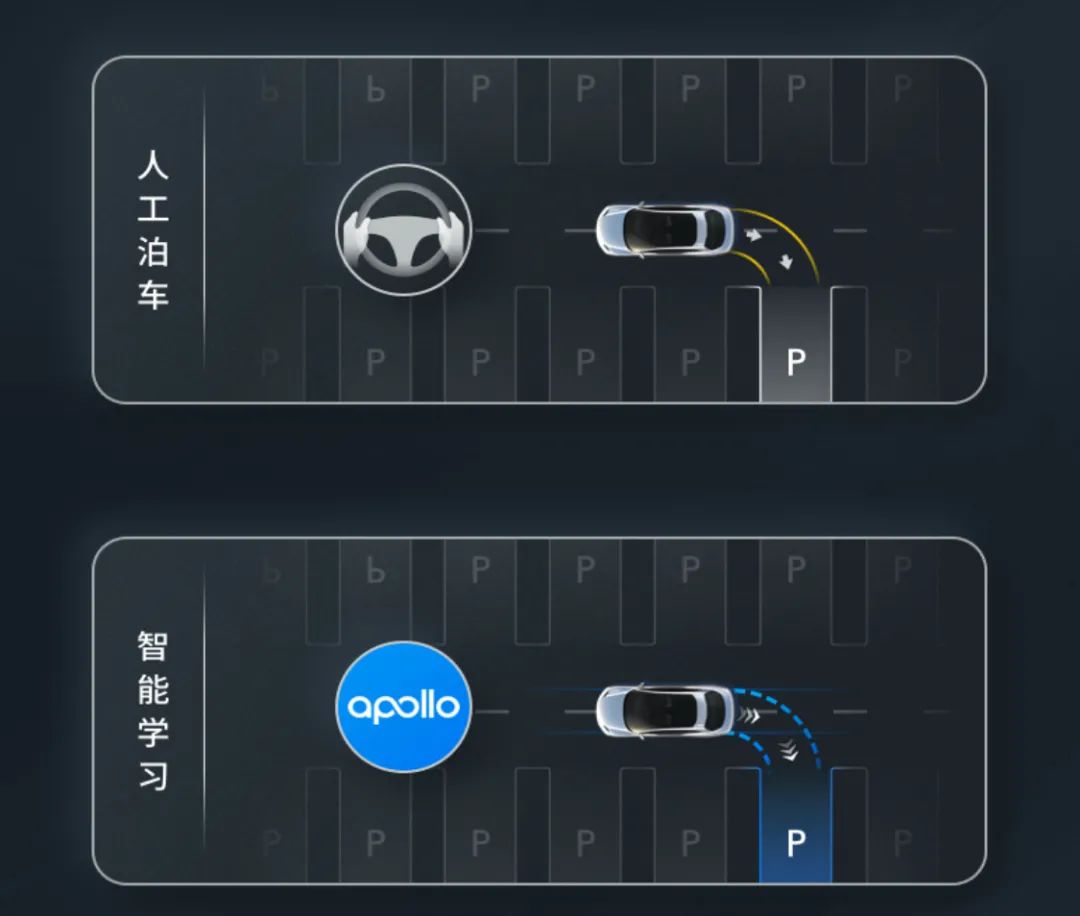
首先体验的是HAVP技术,该功能最大的优势特点是一次自驾学习车辆即可实现自主泊车,并且无需场端改造、无需高精度GPS设备。

在实际体验中,工作人员首先自驾车辆在五彩城停车场进行了一次自驾车辆学习,并随机停在一个空闲停车位。

此时,系统就会自动绘制出一张从落客点到固定车位的地图,从而具备自动寻路以及停泊固定车位的能力,同时,车辆通过无线网络将数据上传到云端利用服务器进行分析和学习,学习完毕后再将数据下载到本地。
工程师介绍称,“车辆本身具备单车分析地图学习路线的能力,但是由于考虑到技术平台成本等原因,相比云端学习在速度上会慢一些。”
为了感受一次学习之后车辆自主泊车的能力,我们在车内进行了一番体验,当车辆达到下车点时,我们只需要通过中控屏幕选择一条刚刚添加的自主泊车路线,车辆便会进行自动行驶,为了保证停车场行驶的安全,车辆的时速在15km/h以下。

在行驶过程中,工作人员还对车辆进行了一些简单的避障测试,比如,当前方有行人时,车辆会根据行人的状态进行减速或者刹车,此外,系统还能够识别停车场中的锥筒、禁停牌等。
特别一提的是,当车辆遇到减速带时,车辆会提前进行减速,在通过弯道时也会自动减速,可以做到平稳行驶。
按照官方的说法是,车辆会遵守限速规定行驶,车辆会根据行驶路况自行调整时速。

当行驶抵达固定车位时,车辆基本只需一次或者二次倒车便可完成停车,当车辆后方有人时车辆会进行停车等待,所以,在进行自主泊车过程中,并不会影响停车场中其他的车辆。
这里需要说明的是,该系统可添加五条停车路线,进一步满足不同场景下的停车需求,不过,HAVP只能停在固定车位,如果该车位被占用,百度可以在云端进行车辆的调控,并完成泊车。
相比HAVP自主泊车,PAVP应用场景更为复杂,在同车端样硬件设备支持下,PAVP技术需要进行场端改造、也需要高精地图建模,不过,PAVP并不需要驾驶学习,也不需要固定车位。

PAVP自主泊车我们体验了自主泊车和自动接客两个过程,为了更直观的感受PAVP自主泊车能力,这次我们选择了一个跨层停车。
这其中的一个难点就是应对停车场的上下坡,由于光照角度的不同,此时摄像头很可能会到一定的影响,此场景中,车顺利通过,在环绕进入地下停车场过程中,车辆行驶平稳,未出现急加速、急减速等情况。
临近中午,该停车场出现了大量的社会车辆以及驻足观看的行人,导致整个场景难道加大,不过,这不影响车辆的发挥,在应对车辆以及行人时,也是非常稳定自如。

当遇到有从车位驶出的车辆时,此时自动驾驶汽车会提前有一个减速动作,并且会选择在适当位置停车,等待车辆,在转弯时,车辆方向盘转动规律平稳。
经过行人穿行、车辆占道等一系列复杂情况,自动驾驶汽车准确找到预选车位,并且成功停下,车辆基本保持在车位正中央。

需要指出的是,在行驶过程中,该车的速度大约在5km/h左右(因为限速要求),所以车辆的速度较低,停车场一度出现了后车按喇叭的情况。
不过,也从一方面说明了,作为公共场所,停车场也应该加大管理,控制车辆在停车场中快速驾驶的行为,从而保证行车安全。
最后,在驶出停车场时,演示了在远程召唤车辆来到指定地点,驾驶员上车后自主行驶出停车场情况。
该场景下车辆表现依然出色。
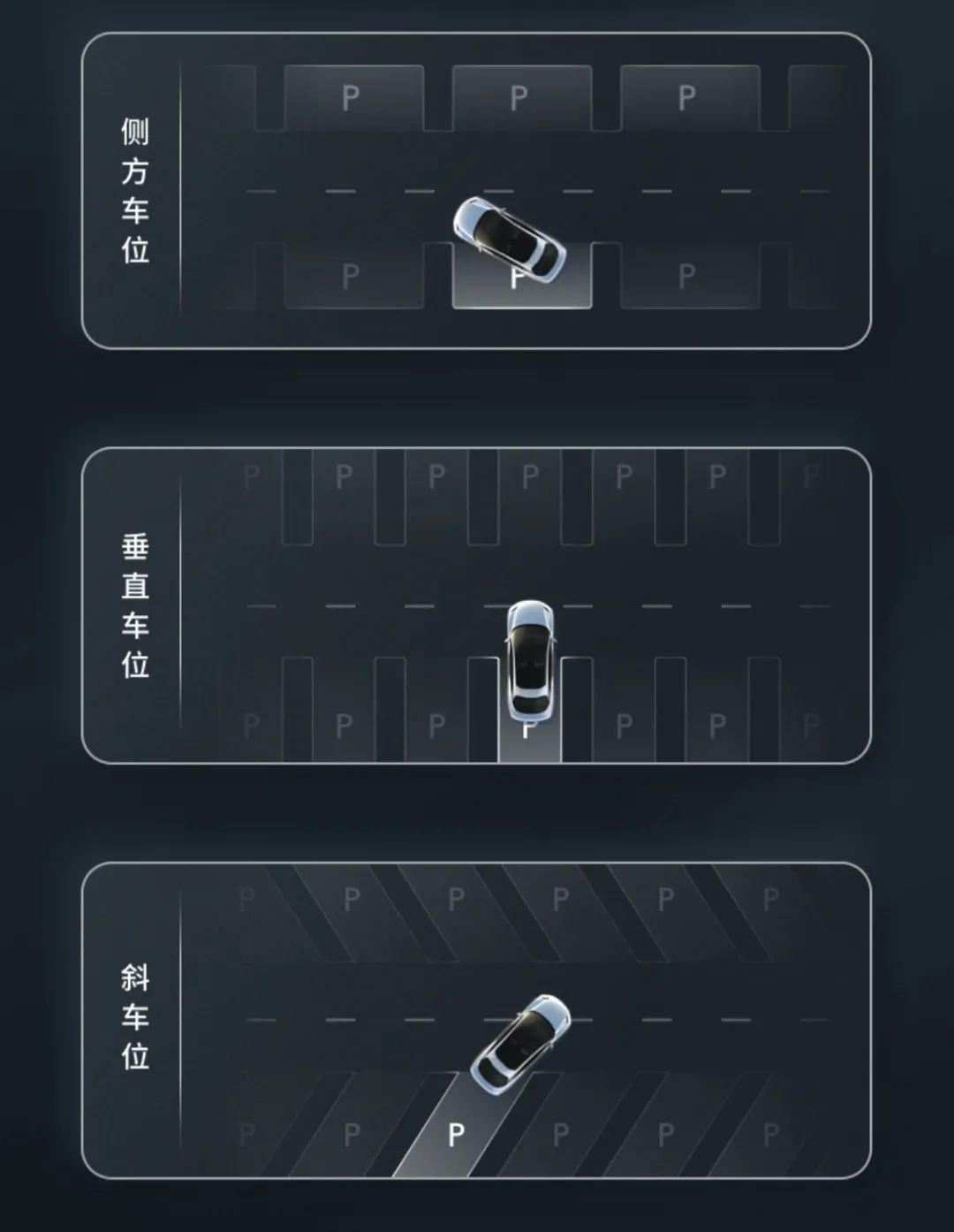
需要强调的是,百度Apollo Valet Parking自主泊车方案能够应对市面上95%以上的停车场的标准车位,并可以支持车位内无阻车器的纯线框车位。
同时,系统还能承受天气的影响,当大气能见度大于100米、降雨量24小时内小于10mm,降雪量24小时内小于2.5mm、室内停车场车位光照强度大于20lux,车道光照强度大于30lux都可正常自主泊车工作。
作为智能驾驶时代的技术创新产物,百度Apollo Valet Parking自主泊车方案利用百度独有的车云图厂一体解决方案以及云和高精地图优势,实现了智能泊车场端改造的最佳性价比。
车端百度通过车规级传感器可以实现车辆的中、近环境感知、轨迹规划和车辆控制,加之百度云和百度的数据积累经验及大数据分析能力。
百度高精地图在国内多家OEM测试通过率100%,相对精度为0.1 ~ 0.2米,冗余率/遗漏率仅为0.01%,从而实现自主泊车巡航精度和高安全,与此同时,基于高精地图和视觉AI,自主泊车可以保障10cm精度定位和巡航。
而在落地应用层面,百度Apollo Valet Parking自主泊车方案做到了细分化管理,进一步满足了车企、用户多场景应用需求。
当前,行业普遍认可的自动驾驶商业落地需要从4个维度进行考量:封闭场景/开放场景、固定路线/自由路线、低速/高速、车内有乘客/车内无乘客。
如果对这4个维度的8项条件进行整合,可以发现自主泊车将是L4级别自动驾驶中最先实现商用化的一项功能。
目前,国内外互联网科技巨头、传统车企和创业公司纷纷投身汽车智能化变革,提出了多种自动化驾驶解决方案实现自主代客泊车。
行业预测到2023年,自动泊车系统的普及率会超过20%。
而威马W6能率先实现自主泊车商业化落地,威马在智能化上已经取得了阶段性的成功,另一方面,在硬件层面成本将不再是问题。

x

-
 永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54
永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54 -
 上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53
上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53 -
 左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
-
 英特尔宣布成立全新独立运营的FPGA公司——Altera 2024-03-01 12:47
英特尔宣布成立全新独立运营的FPGA公司——Altera 2024-03-01 12:47 -
 哪吒汽车 All In AI,携手360集团推进大模型产品NETA GPT 上车 2024-03-01 17:21
哪吒汽车 All In AI,携手360集团推进大模型产品NETA GPT 上车 2024-03-01 17:21 -
 15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00
15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
