
昨天(11月1日),无人驾驶通用解决方案公司轻舟智航(QCraft)举办首届技术工坊,首次全面分享了轻舟智航在感知、PNC、数据等城市NOA核心技术领域的最新成果和独到优势,对外展示了轻舟“基于数据、成于感知,用最强PNC引领城市NOA新高度,携手生态伙伴,打造适用范围最广的自动驾驶解决方案”的价值主张。

轻舟智航将辅助驾驶的用户价值认知分为“能用、好用和爱用”三个阶段,并正式公布了自动驾驶解决方案品牌Driven-by-QCraft的中文名称“乘风”,寓意“长风破浪会有时,直挂云帆济沧海”,这一方案整合了轻舟的自动驾驶全栈软硬件技术,全面助推城市NOA的量产和落地。
今年以小鹏汽车、极狐、魏为代表的汽车企业推动了城市NOA落地,这是自动驾驶员前进之路上关键的一年。
轻舟智航联合创始人、CTO侯聪在谈及轻舟智航对于城市NOA的思考时表示,“城市NOA是辅助驾驶的天花板,也是无人驾驶的入门槛,它已成为汽车高端智能化的大势所趋。我们会不断拓展城市NOA的ODD,让辅助驾驶从能用到好用,最终让用户爱用,以更普适性的智能驾驶让开车像打车一样轻松。”
轻舟智航目前正在打造覆盖更多场景且具有更高性价比的城市NOA方案,而一颗激光雷达的城市NOA正是当前阶段实现这一目标最务实的方案。
轻舟智航在感知、PNC等底层软硬件架构的能力优势,以及在数据驱动研发模式方面的长期积累,为加速城市NOA“上车”,实现快速量产落地提供了全面的技术支撑。
感知如同驾驶员的眼睛,是城市NOA的重要基础。
感知模型需要精准高效地观察和认知世界、并为下游任务提供有效数据支撑,同时还要满足车规级计算平台的适配,并有效解决复杂路况中的各种长尾问题。
轻舟智航感知负责人张雨表示:“轻舟独特的‘超融合’感知方案拥有领先的‘多传感器时序穿插融合’技术,可让感知模型在不同阶段、利用不同传感器信息相互补充,得到更优融合结果,避免各类误检和漏检,精度高且鲁棒性强。”
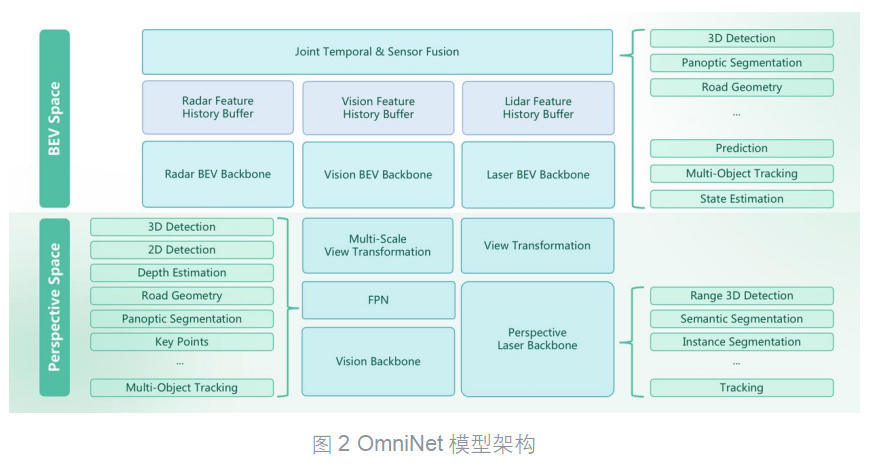
基于“超融合”感知方案,轻舟智航提出了国内首个在量产计算平台实现视觉、激光雷达和毫米波雷达特征和时序融合的大模型OmniNet,以一个神经网络即可实现视觉、激光雷达、毫米波雷达在BEV空间和图像空间上输出多任务结果。
相较传统方案,OmniNet可提供更丰富且准确的环境感知结果,有效提升感知精度;可节省2/3的算力资源,满足车规级芯片应用需求,并可低成本适配不同厂家传感器配置;更适宜通过数据驱动解决实际道路面临的长尾问题,“感知更精准、车端更适配、迭代更高效”,更好地满足城市NOA的量产需求。
通过OmniNet在内的感知算法能力,轻舟智航可让激光雷达“物尽其用”,实现了行业领先的通用障碍物识别能力和噪声过滤能力。
其不仅可以有效识别车辆、人群、植被、护栏、锥桶、小动物、施工区域等常见的道路交通参与元素,还包括各类陌生或长尾罕见的异形障碍物,更好应对城市中出现的长尾问题。逐层递进的噪声过滤方案,还能够最大限度地排除雨雾、泛光等噪声对感知的干扰,充分提高安全性。
PNC如同驾驶员的大脑,负责指导车辆在复杂城市路况中完成导航、预测、决策规划和控制等一系列操作,对于行车效率、舒适性至关重要,是真正打动用户的核心关键。
“城市NOA,PNC定高下”,轻舟智航技术合伙人李栋表示,“轻舟智航能够提供中国最好的PNC方案,我们秉承着自己的算法‘世界观’,致力于以空间和时间复合的视角看待和解决自动驾驶的各类问题,前瞻性地选择了更适合国内复杂路况的决策规划技术架构,独家实现了行业公认更优的时空联合规划算法。”
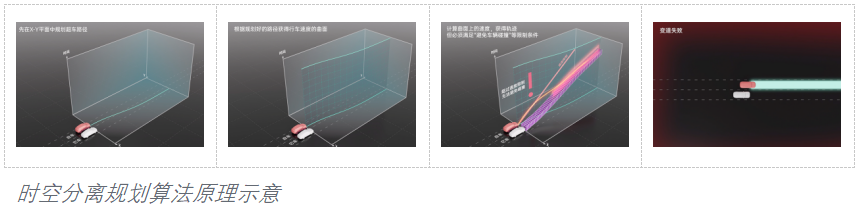
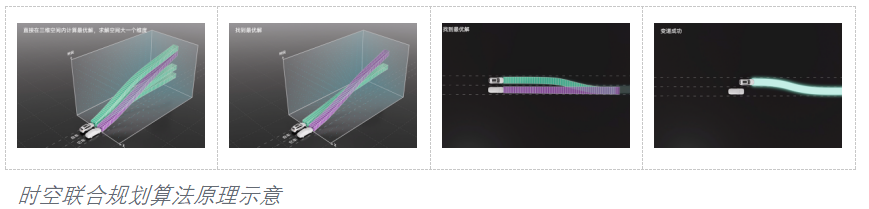
“时空联合规划算法”可直接在空间和时间中求解最优轨迹,如同能够同时控制车辆方向和速度的老司机,更接近实际驾驶行为,可灵活应对国内的各种复杂路况。相较之下,业界普遍采用的“时空分离规划”会将轨迹规划拆分为路径规划和速度规划两个问题,无法同时计算路径和速度,刻板不灵活。不仅如此,“时空分离规划”的研发非常依赖手写规则和大量路测,而“时空联合规划”只需极少手写规则,人效更高,且更适宜利用人类驾驶数据通过机器学习不断提高算法效率。
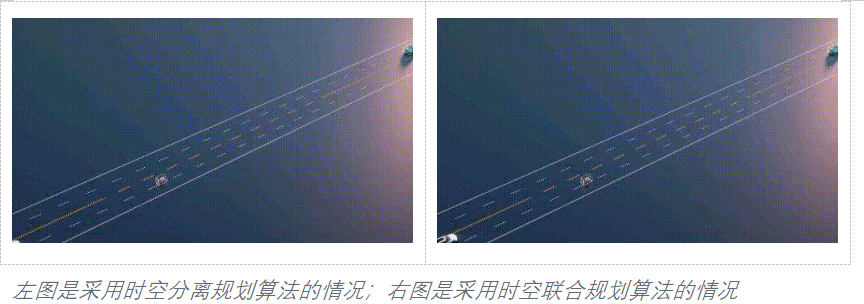
“时空联合规划”能够让车辆行车更聪明、效率更高效、体验更舒适。在实际行驶过程中,当车辆面临动态障碍物的交互时,“时空联合规划”可以让车辆提前把握最好时机选出最佳行车轨迹,更流畅地完成车辆间的博弈,而不会出现反复急刹的情况。在多车道行驶时,车辆还可以通过判断前方车流量和车速,灵活地变道选择更快的路线,而不会“死板地”跟车缓行。
在预测方面,轻舟智航自研的Prophnet预测模型能够提供10秒的长时意图和轨迹预测,预测时长国内领先。模型可同时计算数百个障碍物,每个障碍物提供3条预测轨迹,推理耗时不到20ms,完全满足实时运算需求。根据权威公开数据集Argoverse的评测结果,轻舟Prophnet模型无论在预测效果还是预测时间上均领先同行,且可真正用于量产实车。
轻舟智航领先的PNC性能和研发效率,正是源于数据驱动的研发模式。当前,数据驱动已在感知等模块的研发中展现出了极大价值,但PNC模块由于普遍使用规则系统,数据驱动的实现一直是业界尚未攻克的重要难题。轻舟智航采用的时空联合规划由于在运作模式上更接近实际驾驶行为,可直接利用人类驾驶数据不断进行模型训练。通过对自动驾驶数据和人工驾驶数据的自动化标注,轻舟构建了包含道路、环境、自车行为意图等信息的驾驶数据仓库,可通过“所想即所得”的数据查询,快速对各类数据和场景进行挖掘和评测,更快发现和解决算法存在的各种问题。
实现PNC的数据驱动也意味着轻舟基本打通了数据驱动在整个自动驾驶研发体系中的应用,引领研发范式的革新。
源于L4的数据资源和工具链优势,赋能城市NOA高效落地
数据如同驾驶员的经验库。通过数据提升自动驾驶能力,可以让城市NOA更好地处理复杂多样的交通参与者行为、交通规则,并有效应对市区高精地图覆盖里程有限等难题。
“城市NOA,数据驱动高效落地”,轻舟智航数据智能平台总监刘成表示,“轻舟智航在L4级自动驾驶领域深耕多年,我们在数据和工具链方面的积累,均可降维使用,充分赋能城市NOA的研发。”
截至目前,轻舟智航已测试了超过112万公里的城区道路,拥有海量丰富的L4级别激光雷达、摄像头等传感器数据,以及长期积累的驾驶行为数据,可不断提高城市NOA的能力上限。
轻舟智航用于构建L4级别自动驾驶能力的自动驾驶研发工具链轻舟矩阵,也可以完全复用于城市NOA的能力建设,持续加速城市NOA的能力迭代。
得益于数据与工具链的充分协作,轻舟智航可以高效处理多种典型场景难题,包括对特定行为行人的识别,全国各地不同形态红绿灯的识别等。
特别是针对缺乏或没有最新高精度地图的场景,轻舟的高精度自动化标注工具,可通过高精地图的优化大规模生成车道线的自动标注数据,在路口、匝道、坡道等场景,都能准确检测到行驶车道线。
对于城市中各种静态的交通设施,轻舟采用自监督学习方式,可在大量未标注数据基础上快速学习物体特征,确保行车安全,让车辆快速适应新城市、新场景。
从感知、PNC到数据驱动,轻舟智航此次揭开了城市NOA“冰山”之下的技术布局,展现了作为高级别自动驾驶公司打造城市NOA的独特优势。
凭借领先的技术架构、全栈式的人才团队、丰富的L4级自动驾驶研发和应用经验,以及与硬件、主机厂、软件及供应链等上下游企业建立的良好生态合作关系,轻舟智航正加速推进自动驾驶前装量产,为“双擎”战略的快速发展,实现“将无人驾驶带进现实”最终使命不断迈进。
“乘风”品牌的发布,也标志着轻舟智航以全新的姿态,为打造中国最好的高级辅助驾驶解决方案,实现中国特色城市NOA而奋勇前行。

x

-
全球最大自动驾驶之城是怎么炼成的? 2024-03-04 10:24
-
 15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00
15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00 -
 大众与小鹏合作首款车型曝光:纯电中型SUV,2026年上市 2024-02-29 15:05
大众与小鹏合作首款车型曝光:纯电中型SUV,2026年上市 2024-02-29 15:05

-
 英特尔宣布成立全新独立运营的FPGA公司——Altera 2024-03-01 12:47
英特尔宣布成立全新独立运营的FPGA公司——Altera 2024-03-01 12:47 -
 哪吒汽车 All In AI,携手360集团推进大模型产品NETA GPT 上车 2024-03-01 17:21
哪吒汽车 All In AI,携手360集团推进大模型产品NETA GPT 上车 2024-03-01 17:21 -
15万有骁龙8295,16万配激光雷达,零跑C10发起“配置战” 2024-03-03 14:00

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
