
这是一个疯狂时代。
李书福站上了百度的舞台,百度Aopllo驶入红旗的生产线,一位不知名的素人用水泼了李彦宏。
一切看似简单,但背后是对未来的赌博。
三年前,百度在国家会议中心宣布Apollo开放计划,50多个行业领军企业及机构加盟的代表带着白色手环一同站上了主舞台,在Apollo面前他们像一群懵懂的少年。
三年后的今天(7月3日),在同一个地点,Apollo已经从这里走向世界,经过七次迭代更新Apollo5.0已经成为了全球最大最活跃的自动驾驶开放平台,此时,已经聚集了150多家合作伙伴,24000多名开发者,530000多行开源代码。
此时,更大的合作伙伴已走上台前。

在大会上李彦宏与李书福共同宣布在百度与吉利在智能网联、智能驾驶、智能家居、电子商务等领域达成战略合作。
现场,李彦宏与李书福围绕吉利汽车首款云智能SUV——博越PRO进行互动。
通过百度AI与GKUI19吉客智能生态系统的相互赋能,博越PRO不仅拥有了“超级大脑”,而且作为线上线下高度融合的智能移动终端,兼具车家互联、车联万物的强大能力。
据介绍,从吉利博越PRO开始,吉利汽车将开始全面搭载融合小度车载交互系统的GKUI 19系统。
百度创始人、董事长兼首席执行官李彦宏表示:“历史上出行领域的重大进步,都伴随着前沿技术为交通工具带来的新变化。吉利多年来厚积薄发、创新求变,是中国汽车产业的核心力量,也是当前智能汽车时代的弄潮儿。百度和吉利的战略合作,聚焦AI技术赋能,不仅能为用户带来更自然、更便捷的人车交互,更将加速汽车及出行产业的智能化步伐,助力中国汽车在智能出行时代领跑全球。”
吉利控股集团董事长李书福表示:“中国智能汽车技术的发展已处于全球前沿,为消费者带来了安全、便捷、丰富多彩的出行体验。百度是中国AI的头雁,更是推动产业智能化的先锋,拥有全球领先的AI研发能力和智能驾驶领域的深厚技术积累。此次双方通过战略合作和资源协同,致力于占领行业技术制高点,共同构建引领未来的智能出行生态,为用户创造全新价值体验。”

与此同时,在现场百度副总裁、智能驾驶事业群组总经理李震宇还专门秀了一把合作这些合作伙伴的成绩,他介绍八款产品,分别是金龙客车的阿波龙、智行者公司的蜗小白智能环卫车、新石器的无人零售车、金瑞麟的智能漫步车、udelv的Newton、托儿泰克的阿波牛、酷黑的Apollo D-Kit以及百度研究院的无人挖掘机。
其中,金龙客车的阿波龙已经接驳4万乘客、落地25个城市,新石器已经完成16万次零售服务、金瑞麟的智能漫步车已经和43个景区达成合作等。
李震宇说,“这些产品的落地成功就是Apollo的成功。”
解决最后一公里,百度有话说
我们知道解决最后一公里的关键就是自主泊车,在一众自动驾驶公司发布了自己的自主泊车方案之后,今天百度也带来最后一公里自动驾驶解决方案。
百度智能汽车事业部总经理顾维灏表示,“面对中国乘用车与停车位数量不匹配,停车场有效利用率低等问题, Apollo 自主泊车(Valet Parking)已可以解决大部分痛点,为“停车难”提供了智能解决方案。”
百度Valet Parking自主泊车的方案是利用百度独有的车云图场一体解决方案以及云和高精地图优势,来实现了智能泊车场端改造的最佳性价比。
该方案包括三大场景四大功能,从而解决固定车位日常停车、热门地点短时停车和热门地点长期停车。
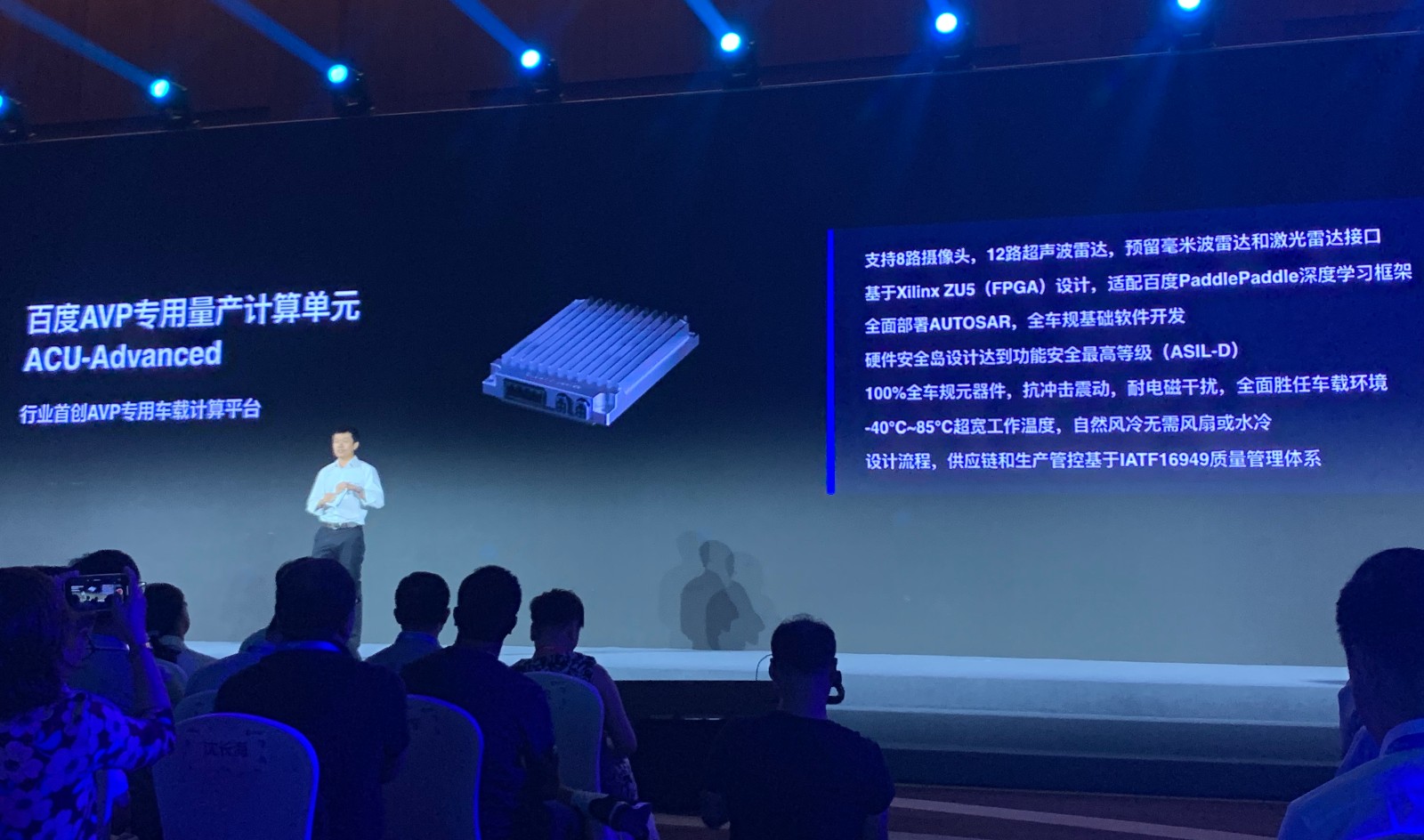
百度Valet Parking自主泊车的方案的核心是搭载了百度首创的AVP专用车载计算平台,该平台基于Xilinx ZU5设计,适配百度PaddlePaddle深度学习框架,支持8路摄像头、12路超声波雷达、预留毫米波雷达和激光雷达接口,全面部署AUTOSAT,全车规基础软件开发。
硬件安全岛设计达到功能安全最高等级(ASIL-D),100%全车规元器件,具有抗击震动、耐电磁干扰、全面胜任车载环境等特点。
值得注意的是,该平台工作环境可达-40度-85度,自然风冷无需电扇与水冷。
ACU已经攻克AVP技术挑战,目前支持多视频源、多算法、多算子、敏捷迭代。
据悉,百度自主泊车试验车已经开放对在百度大厦和百度科技园进行使用。
在商业化方面,百度Apollo自主泊车(Valet Parking)已经获得了新势力造车威马的商业化订单。

作为合作伙伴,威马汽车创始人、董事长兼CEO沈晖来到了智能驾驶分论坛现场,他表示:“作为推动产业智能化发展的重要力量,百度Apollo与威马汽车互为助力。两家不同领域但具备相似属性的头部企业,在今年CES-Asia共同展示了Valet Parking软硬一体解决方案。未来双方将继续联合开放L3、L4级别自动驾驶技术,打造车企智能化转型的标杆。”
据悉,搭载百度Valet Parking软硬一体化解决方案的车将在2021年实现量产,量产车可实现远程取车、还车,自动充电、自主泊车和低速自动驾驶。
自动驾驶出租车落地,是认真的
百度自动驾驶汽车将进入一个新的阶段,即从原有的测试阶段转向运营阶段。
资料显示,在北京市提供的《2018年自动驾驶路测报告》中,百度测试里程最多,占比91%,测试牌照最多占比83%, 更为重要的是在整个过程中零安全事故,在本周百度获得了北京颁发的T4资格牌照。
这是复杂道路场景资格的牌照,也是当前级别最高、最高标准和测试场景最复杂的测试牌照,这意味着百度的自动驾驶能力开始具备复杂城市道路规模测试的能力。
据李震宇介绍,“百度自动驾驶城市道路测试里程达到200万公里,这是城市道路测试里程,区别于园区测试和高速测试,测试车辆达到300辆,同时覆盖13个城市,新增专利数438项,名列全国第一。”

这一系列漂亮的数字面前,百度上个月正式拿到长沙颁自动驾驶测试牌照,不同于一般城市测试许可的是,长沙市将允许”载人测试”,即在法律规定的条件下允许第三方乘客搭乘智能网联汽车,Robotaxi即将迎来真正的乘客。
为了规模测试,为了进一步向前发展,百度与红旗宣布共同打造的全球首个L4乘用车前装量产线已经开始投产。
它是自动驾驶行业的里程碑。
该L4级别自动驾驶汽车它采用了正向设计,告别了原来改装的时代,它开始在前装产线中将自动驾驶和整车设计融合到一起,依赖于一汽红旗的产线,3.6分钟可以下线一台L4级别的乘用车,同时在这个过程中完成60余项整车测试,可以全面保证在交付和行驶的时候能够提供全方位的安全保障。
不过,前期生产线建设投入不较大,在焊接、冲压、总装三个部分的流水线都重新设计。
不过,还在Robotaxi自动驾驶汽车可以和正常销售车辆共有一个生产线。
现场,Apollo旗下Robotaxi项目“Apollo Go”也首次亮相,李震宇还向观众展示了“Apollo Go”的打车小程序界面。
“Apollo Go”项目将始于长沙,率先帮助长沙完成“城市级”智能化升级,打造全国最大规模的L4级自动驾驶出租车车队。
从现场来看,该L4级自动驾驶出租车配置一个禾赛的40线激光雷达、2个四线激光雷达、9个摄像头、9个超声波雷达和2个毫米波雷达。
据李震宇介绍,“Apollo Go”项目启动的初期,由于技术成熟度和技术的限制,只有一小部分用户可以使用,这部分用户为善于尝试和反馈信息的人,有真实的需求的人(比如老人)以及有粘性的用户。
值得注意的是,“Apollo Go”下一站将落地沧州。
Apollo5.0:自动驾驶量产进行时
730个日夜,百度Apollo迎来了第七个版本也是有史以来最重要的一个版本Apollo5.0。
百度Apollo5.0的定义是量产限定区域自动驾驶,也就说从今天起百度迎来了自动驾驶量产元年。
百度Apollo5.0包括Apollo开放平台和Apollo企业版两个部分,对于Apollo开放平台将升级17大重要能力,同时发布一个重量级的量产工具,这个量产工具的名字叫“数据流水线”,它能将开发者搜集到的规模的数据切切实实的转化为自动驾驶能力的提升,快速成为老司机。
对于Apollo企业版部分,升级了原有的三大解决方案,更新两大新的解决方案,一个是面向城市的智能信控系统,一个是上文提到的面向长沙的Robotaxi。
简单来看 ,Apollo数据流水线开放6大能力,包括数据能力赋能量产,包括智能数据采集器、开放合成数据集、大规模云端训练、开放数据应用集、自定义仿真验证器。

这些所有的服务都与Apollo平台无缝衔接,就意味着我们的开发者可以对Apollo数据流水线产生的结果可以直接拿来使用形成这样的一个闭环。
其中车端智能数据采集器可以方便开发者高效的采集到有用的数据,结合百度即将开放的合成数据集以及利用大规模的云端处理的计算平台+上AI建模的能力可以方便开发者自定义事件采集不同的数据。
同时百度还面对开发者所面对的是一些可视化的任务界面,数据采集器会智能实时的对数据的有效性进行验证,并且实时的告诉你数据采集的进度,当这些数据采集来之后传送到我们的云端服务器之后,Apollo数据流水线会利用非常高效的任务调度框架来进行全局的任务调度,并且在高效的非常快速的云端服务处理。
可以说,AI为全量的数据进行建模,大大提升了数据建模的效率。
值得注意的是,在Apollo数据流水线中还增加了场景仿真编辑器,可以让开发者自定义场景来对模型进行验证。
也就是说开发者可以根据自己的需要定义场景、编辑场景,并且这些场景能够与以前所有的历史版本全面兼容,生成的场景可以立刻上线,来提供快速的对模型进行验证的能力。

目前,Apollo5.0已经对合作伙伴开放了基于AI建模的车辆动力学参数标定服务。
基于AI的车辆动力学参数标定服务包括车端数据采集器,配有可视化用户界面,用户可以利用可视化用户界面进行数据的采集。
这个数据采集器可以实时对数据各种有效性进行验证,之后当数据传送到我们的云端服务器之后会自动对数据进行清洗、预处理,并且自动的启用这些AI的模块对数据进行全量的建模,之后模型会自动的得到验证和测试。

百度Apollo平台资深架构师缪景晧表示,“基于AI建模的车辆动力学参数标定服务已经给合作伙伴酷黑进行试用,他们使用了之后非常满意。”
具体来说,相比于他们之前使用人工的方法来对车辆的动力学参数进行标定的经验,在数据采集的时长能够减少到80%,标定全局的数据量增加了4倍,标定的效率因为采用云端标定的方法,标定效率提高了16倍,标定的精度提升了26%。

在Apollo数据流水线开源技术能力方面,Apollo5.0是目前体量最大的人工合成图像数据集,含有包括超过27万张的高清图片,覆盖了包括高速、路口、市区、市内停车场在内等7大场景。
每一张高清图片都在像素级别高保真的还原各种场景并且提供了包括2D、3D、BBOX、语义分割、深度信息、3D车道线等在内的各种真值。

这是帮助开发者提升完善视觉感知的能力重要的一环。
在深度学习方面,Apollo5.0基于PaddlePaddle训练出来的神经网络的模型,可以基于激光点云的障碍物识别模型、基于图像障碍物识别模型以及车道线识别模型。
在感知能力上,Apollo5.0提供了传感器标定的服务,能够在线标定各种传感器,也提供了线下摄象头的标定方法,并且提供了可视化的验证工具。

在算法上,Apollo5.0增加了道路消失点的检测,可以用来对障碍物姿态的检测进行更好的预测,这样可以对车道线识别来适配各种各样弯曲的道路。
在预测能力上,Apollo5.0进一步完善了多场景、多模型的路况预测的系统,该预测系统是对不同类型的障碍物,包括机动车、非机动车、行人等不同类型的障碍物分别建模,同时灵活的架构也方便开发者可以添加自己的场景,包括直路、路口等等。
在模型上,Apollo5.0首先对地图进行建模,来产生语义地图,为深度学习的神经网络添加道路信息,其次在建模的方式上也采取各种各样的建模方式,包括行为的预测、轨迹点的预测、路口转弯方向的预测等。
这里需要说明的是,Apollo5.0也对模型进行了进一步的优化,优化后可根据障碍物的优先级会采用更精确的模型,为更高优的障碍物进行处理。
这样层层分级的架构再进行语义理解、意图分析、障碍物分类的基础上之后,会使用模型调度的框架动态调度最适合的模型对该障碍物进行处理,从而达到预测的精雕细琢。
最后,缪景晧讲到了Apollo的规划系统,其实Apollo整个无人车系统软件里面最重要的一个系统就是一个大量算法驱动的系统,这次Apollo5.0规划系统中主要升级的4个基本算法。
今年1月份在拉斯维加斯Apollo3.5的发布系统中,百度实现了架构的升级,引入了场景化的概念。
在Apollo5.0里面,百度从规划系统里面几个主要算法上面实现了全部的升级,从此Apollo的规划系统全面实现了从架构到算法的升级。

熟悉Apollo规划系统的开发者知道,指引线是Apollo规划系统里面非常重要的概念,它是通过将世界坐标系转换成指引线坐标系来降低问题的求解难度。
据缪景晧介绍,全新升级后采用了基于离散点算法的优化算法,采用优化算法取代之前的曲线拟合的算法的做法可以在速度上面提升7倍,并且越线过界的几率降低了95%。
这就意味着无人车一定是安全的开在车道里的。
在有了非常平滑的指引线之后,Apollo5.0全新的路径边界决策和优化算法,对纵向和横向上采取高度离散化的方式,寻求空间的最大可能性,并且采用非常直观的道路边界决策的方案,把它重新表述为优化问题里面的限制条件,从而使用最新的优化算法来保证路径的高度平滑。
这次在Apollo开放空间的规划算法里面还增加了基于模型的优化算法,将障碍物的形状、道路的边界作为优化问题的限制条件来重新表述,并且也引入了车辆动力学的模型。

这里缪景晧讲到了一个非常知名的开源算法叫做IPUPT,为了能够提高求解的效率对IPUPT进行了大量的工程上的修改增加问题求解的效率,增加求解的鲁棒性,缪景晧称,新的结果已经分享给IPUPT的开源社区,得到了他们的一致肯定。
在控制系统层面,Apollo5.0将传统的车辆动力学建模方式升级到基于机器学习的Apollo动力学模型。
我们知道传统的建模方式在模型的复杂度、模型的精准度、模型的可迁移性、和可扩展性,甚至对开发者的开发成本上面等等种种维度上面都具有很多很多的局限性。
而基于机器学习的Apollo动力学模型具备模型复杂度高,模型精细度高等特点,据悉,与传统方式建模结果相对比在误差上能够减少80%。
值得关注的是,这个全新的模型是基于Apollo数据流水线的产出,这就意味着开发者能够有效的利用数据流水线进行开发工作。
用缪景晧的话来说,开发者、作伙伴真的可以足不出户在Apollo的仿真环境里面来验证控制的性能和效果。
作为支持自动驾驶汽车可量产的开发平台,Apollo5.0在硬件上面也进行了升级。
这次升级主要包括车载计算单元、组合导航系统、摄象头、激光雷达以及将原来的ASUApollo传感器单元升级为Apollo传感器增强版。

在发布会上,百度智能驾驶事业群硬件总监Helen K.Pan从Apollo传感器单元增强版增加新功能、硬件设备选型提供更丰富选型、新增硬件评估标准三个方面介绍了Apollo5.0开发平台的硬件能力。
Apollo传感器单元增强版(Apollos ensor unit pro)进行了功能的提升和性能的增加,具体来说与初版ASU相比不仅提供了两种相机的接口,支持pdlink也支持gmcl以及4个车规级以太网口。
同时从原来同时接入5个摄象头升级后支持12路摄象头,每个摄象头可以支持800万像素。

新功能方面,Apollo5.0提供了更多传感器的驱动和其他硬件的驱动,包括时间同步、信号处理以及全栈式性能的监控系统。
发布会上,Helen K.Pan用三个实例介绍了三个新增功能的能力,这里智驾君根据Helen K.Pan演讲来简单介绍一下。
第一个实例,关于GPS信号波动的平滑处理来增强系统的稳定性。

在解决地下车库自动驾驶汽车GPS信号丢失问题层面,Apollo5.0通过机器本身的RTC拿到精准的系统时间,它的精准度到1小时到一毫秒的分差。
同时,在高楼或者灌木丛遮挡GPS情况下,Apollo5.0通过平滑处理可以提供稳定的信号处理。
第二个实例,关于视频压缩。
据介绍,传统的gpack优化一般是提供4倍左右的优化,Apollo5.0加入新的增强的压缩功能可以优化到40倍的压缩能力。

这里关键的一点是,在传统的计算压缩过程中需要占用3-5个计算核的运算力,通过嵌入式压缩功能只占用0.2个核的运算能力,所以进行了大约16倍的提升,通过这些性能提升提高了图像的压缩比,也释放了更多的计算资源。
而带来最大的好处是,NVME一般一万人民币,通过缩可以减少几百人民币存储。
第三个实例,全栈系统监测能力。
全栈系统监测能力是自动驾驶汽车中至关重要的能力,首先要保证所有的硬件在自动驾驶系统里是能正常、安全的状态下运行,这是Apollo5.0从底层硬件层到network到上层系统都提供了监控的能力。
应用层,通过对硬件实时的监控可以提供它的电压、电流、温度、IO、同时可以达到传感器还有通讯接口的实时监控,比如数据校验、数据观察、动态报警。

制约自动驾驶汽车量产除了法律还有一个重要的问题就是硬件的价格,多样的硬件选择毕竟会带来成本的下降。
在发布会上,Apollo公布了8家硬件厂商加入的硬件开发平台,这里包括KALRAY硬件芯片加速器、IPA厂商车载级芯片提供IPGA、禾赛40P,中科慧眼、北斗星通、导航系统,米文动力的低成本的单元,中海达的北斗地基增强系统,还有UHNDER的雷达芯片。

最后说一下Apollo5.0新增硬件评估标准,Apollo5.0提供了从底层硬件到系统层还有上层应用层的一个全方位的硬件评估工具。
这个硬件评估工具它支持从底层硬件到上层软件进行了全覆盖,同时支持多个平台的评测,为软件应用跨平台移植提供了依据。
具体来看,这个硬件评估工具可以对算力、时延、功耗、成本进行评估,算力上可以评估它的神经网络、串并行计算、存储、I/O,时延上提供均值、分值以及端到端的时延及模块级时延,功耗上有平均模块的功耗,整体机型的功耗还有平均值和峰值。
对于Apollo企业版这里重点讲一下首个智能交通解决方案——智能信控。
百度自动驾驶事业部总经理孙勇义表示,“百度智能交通相关技术,正在助力城市交通提升效率。”
据介绍,百度在保定做了非常扎实的信号调优工作,实测应用路段早晚高峰期间行程延误时间减少了20%~30%,缓解突发交通拥堵效果显著,未来还将进一步提升控制效率,从交通出行的各个环节提高效率,推动交通产业智能化变革。
而智能城市的小型样板间——AI公园也继续其落地进程,据介绍,百度在广东省佛山市的地标景点千灯湖建立了AI公园。
千灯湖坐落于佛山市内经济最强区南海区,全球首款量产L4级自动驾驶巴士阿波龙也在千灯湖实现了车站接驳。
千灯湖项目作为百度跟佛山市深化战略合作的一个起点,双方未来会在在智能文旅,智能政务,智能交通,IDC,大数据等方面产生更多更有影响力的合作项目。
在出行方式不断变革的今天,百度的智能驾驶技术已经占据了人们的大部分视线。
在发布会上宝马(中国)服务有限公司高级副总裁 Dr. Martin SAUTTER这样评价:“中国拥有像百度这样全球领先的科技公司、全世界最年轻、思想最开放的客户群体和最复杂的驾驶环境,同时政府对自动驾驶非常支持,这让中国站在自动驾驶发展的前沿阵地上。”
而李震宇则说,“我们之所以选它,不是因为它简单,而是因为它无比的艰难。而作为开发者的我们一定有这样的责任感,每一次交通事故都应该避免。作为自动驾驶的我们还应该都有这样的信念,自动驾驶技术必将令未来的交通和出行更加安全。”


x

-
 永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54
永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54 -
 上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53
上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53 -
 左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
-
 长安发布“天枢领航”辅助驾驶系统,启源Q06将全系搭载 2026-06-13 16:40
长安发布“天枢领航”辅助驾驶系统,启源Q06将全系搭载 2026-06-13 16:40 -
 全新深蓝S07华为乾崑激光版增程车型上市,限时15.49万元起 2026-06-13 16:53
全新深蓝S07华为乾崑激光版增程车型上市,限时15.49万元起 2026-06-13 16:53 -
 阿维塔全系亮相重庆车展,概念车VISION XPECTRA山城首秀 2026-06-13 15:42
阿维塔全系亮相重庆车展,概念车VISION XPECTRA山城首秀 2026-06-13 15:42

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
