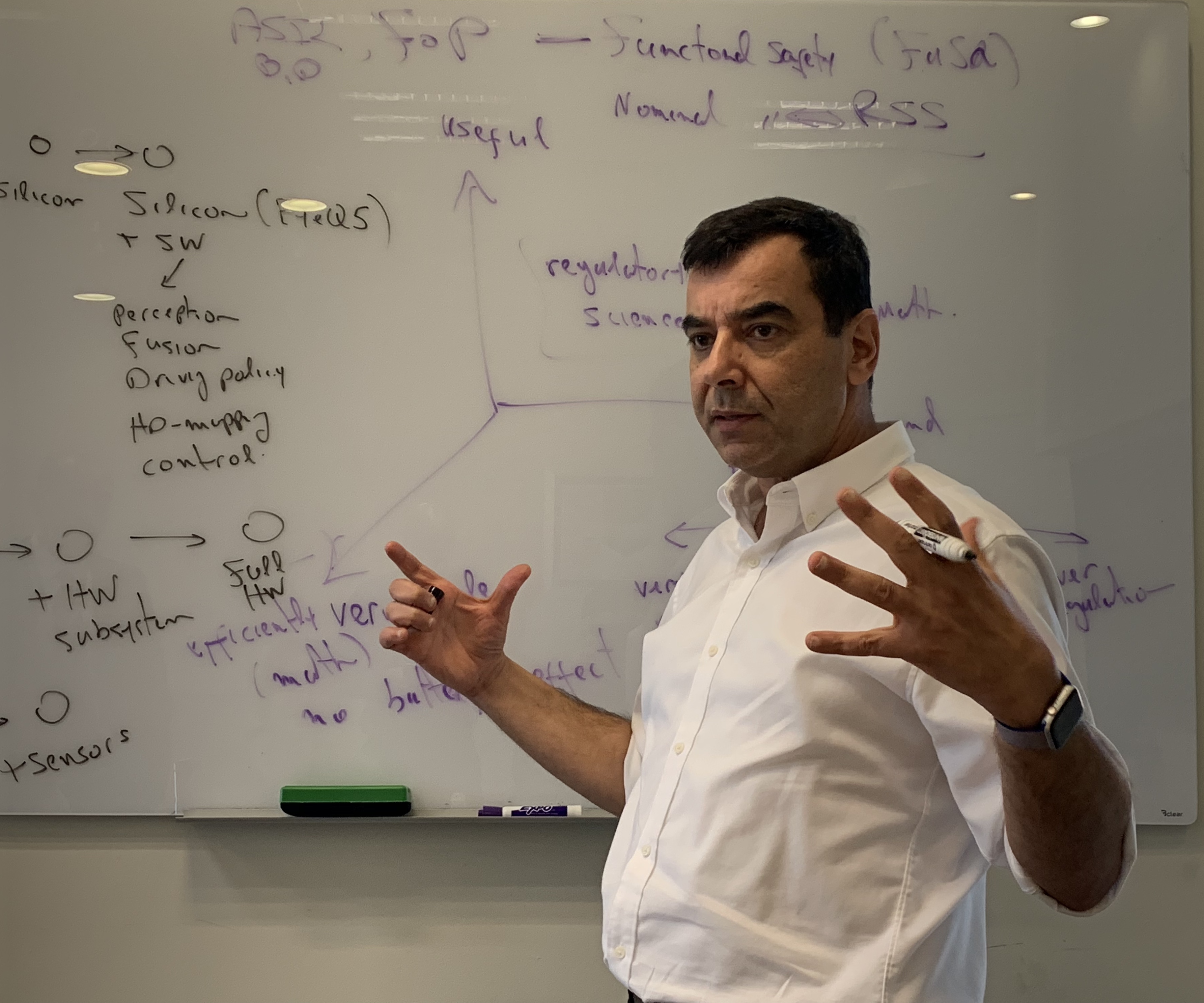
文丨Mobileye CEO Ammon Shashua教授
为了赢得汽车市场份额,Mobileye将开放架构。
在以色列Mobileye总部英特尔公司高级副总裁、英特尔子公司Mobileye首席执行官兼首席技术官向智驾君表示,“在今年12月Mobileye推出的EyeQ5芯片将是开放架构的,到时我们的客户,如宝马、克莱斯勒就可以在芯片上编写自己的代码,自己来做融合。”
Mobileye的构架是建立在不同的模块上的。
其中一个模块是感知,微处理器会不断处理传感器传递过来的信息,而微处理器通过处理数据来解读周围的环境,例如:其他车辆的位置、行人的位置、交通指示灯和交通指示牌等物体的信息。
这个系统是关闭的。
Mobileye也没有理由说为什么要开放这个系统,就像Gmail的系统也是关闭的一样。
这就是Mobileye处理视觉信息的算法。
另外是融合和驾驶决策的算法,就融合方面,Mobileye把雷达和激光雷达等传感器收集的信息进行融合。
接下来是最复杂的部分,即驾驶决策,驾驶决策指的是车辆自己的行驶判断。一旦车辆明白了周围的环境,它需要判断采取什么样的措施,比如:是否需要变道?是否继续行驶?是否达到了安全距离?如果要变道的话,需要超越哪辆车?需要给哪辆车让行?
这一套算法分成两个部分,一个是负责决策执行的算法,另一个算法是保证决策后的行驶安全模式。
在这部分,整个行业仍然是不透明的状态。比如Waymo的汽车,你并不知道决策后面的方案细节。比如汽车变道,是否有相关的测量方式来衡量驾驶员小心还是不小心?
而Mobileye则是唯一一家决定对外公布开放文件的公司,这就是Mobileye的RSS(Responsibility Sensitive Safety 责任敏感安全模型)。
Mobileye希望通过建立数学公式的手段,来使得自动驾驶汽车有能力判断自身的安全状态。
Ammon Shashua认为这是整个行业内的一大革命举措。
为什么呢?
因为当人们在谈自动驾驶的时候,通常会想到技术,以及计算机视觉和人工智能算法是如何工作的?
如何进一步加强机器学习和深度网络?
自动驾驶汽车其本身实际是一台机器,而这台机器有可能会威胁到人们的生命。那么我们要对社会如何交代?如何处理这台机器给社会带来的影响?
你不能仅仅说这台机器应该遵纪守法。为什么不能这样说呢?
因为如果我们仔细研读的话,你会发现有一些法律法规是写的非常明确的,但是其中有一条则是有很大的解读空间,即“注意义务”(duty of care)。
这条法律规定人们必须要履行相应的注意义务。虽然有法律规定,但是你也有注意义务。
如何理解保持注意(义务)则是开放的。
其定义与社会规范有关,与判例有关,比如之前发生过某事件,法官是如何裁量判决的,这将成为后面案件参考的判例。
但是我们不可能在还未把法阐释清楚前,就让一台机器上路行驶。
例如,我换道,然后一辆车从后面撞了我的车,那么两方将会各执一词。我会说对方开车不专心,对方会指责是我开车鲁莽大意,而只有法官才能够最终裁定。法官会问我如何理解“保持注意”,并看我的解读是否符合社会规范。
Ammon Shashua认为,我们必须要提前防范,必须把这一操作进行公式化,必须明确地界定出“保持注意”的意义。
这一解读应当有三个纬度。
第一,合理性。即要满足人们对“保持注意”的理解,满足人们对“保持注意”的判定,而不是天方夜谭地疯狂定义。
第二,有效性。因为可能我们有了一个合理的定义,但是这个定义可能是完全无用的。举个例子,假设我想变道,现在我们规定一个听起来还不错的定义:在我变道的时候,其他道行驶的车辆都不允许改变速度,不应该受到我变道的影响。这一定义貌似听起来挺好的,挺“小心”的。但是这样的话,在中国你不可能变道,在以色列也不可能变道。
为什么呢?因为实际变道的时候,其他车辆必须减速让你插入换道。所以我们有可能做出了一个无用的定义。这也就是为什么我说有效性是第二个纬度。
第三,纬度是可验证的,效率上必须可以进行验证。即必须把我下的定义同机器进行实际结合,验证我的定义是否正确和有效。我必须证明没有蝴蝶效应。
什么是蝴蝶效应呢?
蝴蝶效应指的是我现在做一个很小的无心之举,通过系统中其他动作的作用,最后导致了一场事故。这场事故最终发生的原因其实是因为我开始时一个小小的无心之举。如果类似事件真的会发生,就意味着我在验证我的动作时,我必须推算出未来。
举一个蝴蝶效应定义的例子。假设在我所作的定义里面有这样一条规定,如果我后方的车辆离我太近,那我就提速。
现在后方的车辆离我非常近,我立马提速。这听起来很合理,很多人也确实这样做。但是如果我们对这一定义进行验证的话,我们会发现没办法验证。
因为我们必须推算未来,那么多重因素和事件都会牵涉其中。所以每一个做出的定义,必须合理、有效且能够通过数学的形式进行验证。
Ammon Shashua说,Mobileye是自动驾驶行业最“开放”的公司,因为我们相当于在业内奠定了一块基石,帮助推动整个行业的发展。我们现在同主机厂合作,同行业供应商合作,同美国甚至中国的监管机构进行合作。
百度4个月前正式宣布采用Mobileye的RSS模型。我们正在做的是开放的、透明的、并有利于整个自动驾驶行业发展的事。因为如果没有这些的话,没有哪一家车企或技术供应商敢让这台机器上路,否则一旦发生了事故,我们怎么办。
当然,Ammon Shashua教授提到这个RSS让我们想到阿西莫夫机器人三定律,是不是代表着自动驾驶汽车也需要这么一个机器人三定律。是不是整个产业要对安全策略有一个共识?
RSS是基于模型的思维,与统计性思维不同。
统计性思维想的是我要如何说服社会相信我的机器是安全的。为此我会开很长的里程,比如我让车队开1000万公里、1亿公里,没有发生事故。
里程越长,我的系统也更成熟。这种统计性思维的问题在于,只有在你证明你的数量级比人类更有优势的情况下,该系统才能真正发挥作用。
这方面的问题在于你需要收集的数据量将是非常庞大的。
我们来看看人类的数据。人类开车一小时内死亡的概率是三百万分之一,这个是人类的数据。
现在假设我们希望结果提高10倍?
有一篇中国的报告称说只有在车辆表现比人类好100倍的时候,社会才会开始接受自动驾驶。那么现在我们假设成100倍。这就意味着要开1亿小时。
假设一个小时开30公里,那么行驶的距离共计30亿公里。这完全是不可行的。统计性思维的第二个问题在于它不是透明的、不是公开的。
如果发生了事故的话,我不知道怎么解释事故发生的原因,因为它是一个黑匣子,只有数据。而我们的是基于模型的思维,每一个部分都是开放透明的,你能完全理解车辆为什么做出这种判断决策,每一步都经过数学验证的,完全开放。要获得社会信任的话,透明是非常重要的。
那么如何应对监管机构呢?
监管机构有两个监管方面的极端,一是过度监管,即监管方想要的超过了技术公司能够提供的,于是监管方不断给技术公司施压,这可能会毁掉整个行业。
二是无监管或非常少的监管,即只用通过非常少或基础的准备,车辆就可以上路行驶了。
这是美国的方式。
美国监管方称我们不想干扰科技革命,所以我们不会过度监管;而我们又不是真正地懂技术,我们也不知道如何监管。
所以我们只颁布非常基本的准则,科技公司自己去试,毕竟也是你们科技公司自己的生意。那么结果是什么呢?
如果发生了事故,是你公司自己的责任。机器和人类之间发生的事故会引起社会很大的关注。所以我们认为,正确的定位应该在这里。不是过度监管。
“这里”指的是同监管者一起对“注意义务”进行定义。
例如,这个定义的内涵是什么?为什么我们要“保持注意”?
这是因为我们在做一件事情的时候,我们并不知道其他人在干什么,这就导致了不确定性。那么我们如何解决这个问题呢?
我们要对其他人会做什么进行合理的假设,并在此前提下对可能发生的事情做最糟糕的假设。
举个例子,假设我在开车,我前面有一辆车,我需要跟它保持安全距离,为什么呢?
因为我做了一个最糟糕的假设,就是前面的车瞬间破成碎片,保持安全距离可以保护我不受前车碎片伤害。
现在我还需要假设它的破断拉力是多大。如果它的破断拉力是无穷大的,那么车应该基本就是停止不动的,而我需要保持的安全距离则太过于长,并没有任何实际意义,因为其他车辆总会超过我。
所以我需要假设下前车最大的破断拉力,是0.6G?还是0.8G?这些就是我们做的假设。而我们还要同监管方共同探讨这些假设,因为这些假设都是我们建立的开放模型的一部分,帮助我们实现三个纬度的考量,并优化“注意义务”的定义。
同监管方就“注意义务”的定义达成一致意见:这是很困难的。
为什么呢?
因为律师更倾向法律的开放解读,这也就是为什么我们有法官、法院。监管机构是律师,如果我们逼他们把法律的定义进行模式化,肯定会遭到他们的拒绝。如果发生事故的话,他们希望你能去法院解决,这也是法院存在的原因。
所以我们必须得让监管者认识到,不这样做就会走向两个极端,一个是过度监管毁掉整个行业,一个这是监管过少造成行业难以发展,或者有了初步的发展,但是发生几起事故之后,行业死亡。
前两天有一个非常重要的新闻,那就是Mobileye和大众宣布共同合作首个自动驾驶网约车服务(也可称为出行即服务,MaaS)。这个项目的重点在于,以色列将推出全球第一个由政府参与的自动驾驶MaaS项目。政府提供其监管架构,支持MaaS发展。以色列政府承诺将成立专门的委员会,开始讨论监管壁垒和研究相关事项。
这才是这个项目真正的重要之处。
特别之处并不是在以色列落地MaaS,在任何国家,美国、欧洲并没有什么差异。不同之处在于每个国家监管方式是不同的。
美国的方式是,你想做就去做吧,我们不会阻止你;欧洲的方式是重重监管,所以整个行业很难真正起步。
以色列的方式则是,我们希望能够促进MaaS的发展,我们是一个面积很小的国家,我们是一个创新力很强的国家,我们甚至希望能够在监管上进行创新。
所以我们在做的不仅是技术创新,更是监管创新。我们称为“创新型监管”(制度创新)。这就是以色列在做的,这就是为什么这个合作项目如此重要。
我相信中国现在的思维也是一样的,虽然我们两国的规模不一样,但是中国现在的思维也是要不断进行创新。
Ammon Shashua想强调的是,创新不仅仅是技术上的,也是监管(制度)上的。我们要做律师们之前很少做的事情。
这就是我们称的新的“学科”。为什么是新的“学科”呢?是因为这个部分如果要给出一个合理的定义的话,哲学家和律师们可以做到。
要给出一个有用的定义,哲学家、律师、心理学家可以做到;这个部分主要是数学构成,需要非常严密的数学逻辑来证明归纳原则的准确性。
我把这三个部分合在一起称为“法规科学”(regulatory science)。
这是一门把法律和高等数学结合在一起的学科。我们这样做是为了实现我们的目标。这是Mobileye正在做的一个非常具有创意的方式。
也是从第一个“封闭”的问题开始,其实整个行业是“封闭”的,我们公司是“开放”的,我们同行业伙伴和监管者一起开放合作。
在以色列宣布的这个项目其实是整个全球方式中的一部分,要做的是拥抱监管机构,让他们认识并参与进来。
Ammon Shashua认为如果一个国家的监管者没有这种思维的话,那个国家是没办法做无人驾驶的。它会朝着两个监管极端发展,而这两个极端都会毁掉无人驾驶行业。
Ammon Shashua称,“保障”这个词其实有点复杂。并不是科技公司想要政府给予保障,科技公司想做的是去澄清什么世按照驾驶规则行驶的意义。
当然,遵照法规意味着不能跨过双实线,不能闯红灯,这些都是非常清楚的。但是法律规定说要“小心”,要“保持注意”。这什么意思?
这就是监管应当入手的地方。
用模式正式界定“保持注意”的含义。而要做到这种界定则非常复杂,这就需要我们提到的三个纬度。这是其中最最复杂的部分,要解释“保持注意”的定义,并确保其定义是可验证的。这便是我们将其称为“法规科学”的原因。它不仅是法律,它是法律加数学。
但我们在谈论安全时,共有两种形式的安全,而很多人常把两者混为一谈。一是,功能安全-FUSA(functional safety),二是,名义性安全(nominal safety)。
功能安全指的是确保整个系统是否完整?是否有程序故障?是否有硬件故障?
如果有的话,是否可以弥补?
这就意味着你必须把一些部分扩大备份处理,这样一旦一个零件出现问题的话,有备份方案可以替代上去。
这包括辅助信道、故障安全操作、在不同的芯片上将核心功能进行备份。这些简称为SOBD,都是自动驾驶文化当中确保安全的组成部分。
RSS是名义性安全,指的是系统的设计。即在开始设计系统的时候要确保不会给社会造成安全事故隐患,这与备份或冗余系统并不一样。我在变道的时候撞车了,这与冗余系统无关。事故发生是要么是因为我决策失误,要么是对方决策失误,而不是冗余系统的关系。
这是与系统的设计挂钩的。我是如何设计系统规则的?我是如何估测危险的?以及在估测之后采取什么措施?
所以这并不是功能安全,RSS是名义性安全。人们还尚未探讨过名义性安全。在汽车行业,人们还是关注数据,崇尚开的里程越长越好。但是这个方法是不对的,它既不透明,而且你还需要行驶30亿公里,这完全没有意义。
我们来看看价值链。这是价值链,这部分是硅+软件。硅也就是我们EyeQ家族芯片,就自动驾驶而言是我们的EyeQ5芯片。
软件是感知,或者我们称为计算视觉;传感器融合;驾驶决策,既驾驶时做的决定,我们称为驾驶决策;地图,设计高清地图,既你开车时在手机上看到了各种线,这就是预测模拟出的交通地图实况。
就软件角度来说,这是端对端的,从传感到动作,我们在这里加上车辆控制。当我们同主机厂合作时,我们有时候提供全套解决方案,有时候只提供部分解决方案,比如只提供感知的方案,主机厂自己做融合。
这种情况下价值链只延伸到了芯片。这部分是开源计算的。我们的一些客户购买我们感知处理的芯片,然后自己开发融合方案。
另外一条价值链的模式是包括上述全部,再加上硬件子系统。他们购买的不是原始芯片,而是从感知到行驶决策的硬件打包产品。相当于一块硬件,你可以假设有台电脑,你购买的硬件可以插入电脑。
第三种模式是全套硬件,好比负责所有内容的整一台电脑。
第四种模式是加上传感器,摄像头、雷达和激光雷达。可以是我们从第三方采购的雷达和激光雷达,或者是未来我们自己设计制造的雷达和激光雷达
Mobileye现在是英特尔的一部分,英特尔比之前单枪匹马的Mobileye要实力雄厚得多。
英特尔有自己的硅光子生产线,可以生产雷达所需的芯片。该生产线还有一个负责雷达通讯的部门,可以调整来做汽车视觉雷达。
Ammon Shashua:所以展望未来,我们有能力自己生产传感器。

x

-
 永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54
永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54 -
 上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53
上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53 -
 左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
-
 长安发布“天枢领航”辅助驾驶系统,启源Q06将全系搭载 2026-06-13 16:40
长安发布“天枢领航”辅助驾驶系统,启源Q06将全系搭载 2026-06-13 16:40 -
 全新深蓝S07华为乾崑激光版增程车型上市,限时15.49万元起 2026-06-13 16:53
全新深蓝S07华为乾崑激光版增程车型上市,限时15.49万元起 2026-06-13 16:53 -
 阿维塔全系亮相重庆车展,概念车VISION XPECTRA山城首秀 2026-06-13 15:42
阿维塔全系亮相重庆车展,概念车VISION XPECTRA山城首秀 2026-06-13 15:42

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
