敢于对外公布自动驾驶事故的公司目前也只有Waymo了。
近日,Waymo发布了关于亚利桑那州凤凰城自动驾驶汽车运营的第一份报告,报告指出,在2019年和2020年的前9个月期间,Waymo自动驾驶汽车共发生了18起撞车事故和29起未遂事故(模拟器中发生的事故)。
简单概括来说数据涵盖两种类型的事件:
Waymo车辆在公共道路上行驶时遇到任何形式的碰撞或接触的事件。
Waymo车辆操作员脱离自动驾驶车辆,在模拟中发生的事故。
这些碰撞事故包括后方追尾、车辆剐蹭以及Waymo车辆在以60多公里每小时速过路口时,被另一辆汽车拦腰相撞,不过,这次事故全责在于对方车辆,并未涉及人员伤亡问题。

Waymo称,“目前,尚无全球或国家认可的框架来评估自动驾驶汽车的相对安全性,因此,我们正借此机会与同行、利益相关者和社区共享与安全相关的数据。”
Waymo的做法值得行业学习,尤其是国内已经开展Robotaxi服务的公司。
当前,Waymo公司拥有约600辆自动驾驶汽车,其中300多辆汽车运营在钱德勒,吉尔伯特,梅萨和坦佩大约100平方英里的服务区域。
数据显示,在2019年1月至2019年12月期间,带有安全员的Waymo车辆行驶了610万英里,完全无人驾驶的车辆大约行驶了65,000英里。
Waymo自豪的称,“自动驾驶行驶的里程,相当于美国普通司机500多年的驾驶时间”。
值得注意的是,Waymo车辆在与包括车辆、行人和骑自行车的人发生的47起碰撞事故中,几乎所有事故都是人类驾驶员或者行人的过错,而且没有造成任何“严重或危及生命的伤害”。
Waymo自动驾驶汽车是足够安全的。
Waymo表示,他们还对安全员控制车辆以避免碰撞接管事件进行了模拟分析,该公司使用这些事件来检查车辆的反应,然后使用这些数据来改进其自动驾驶软件,最终,这些反向模拟比“合成”的模拟事件“更现实”。
爱荷华大学国家高级驾驶模拟器实验室主任McGehee表示,“对这些模拟场景的使用将Waymo与其他自动驾驶运营商进行了区分,这是因为它使Waymo可以深入研究可能导致碰撞的各种问题,例如传感器的可靠性或车辆感知软件对特定图像的解释。
McGehee在采访中说,“它们确实超出了常规数据,这点是非常新颖独特。”
在47起碰撞事故中,Waymo强调了“最严重或潜在危险”的八起事件,这些事故中三起发生在现实生活中,五起发生在模拟事故中,值得关注的是,在所有八起事件中,安全气囊均已打开。
以下是几起严重事故的详细解读:
模拟车辆逆向行驶相撞:
Waymo公布的图片中可以看到这是模拟逆向来车的一个场景,图中,实线轨迹代表在现实生活中可以观察的车辆轨迹,而虚线轨迹和阴影代表着模拟条件。
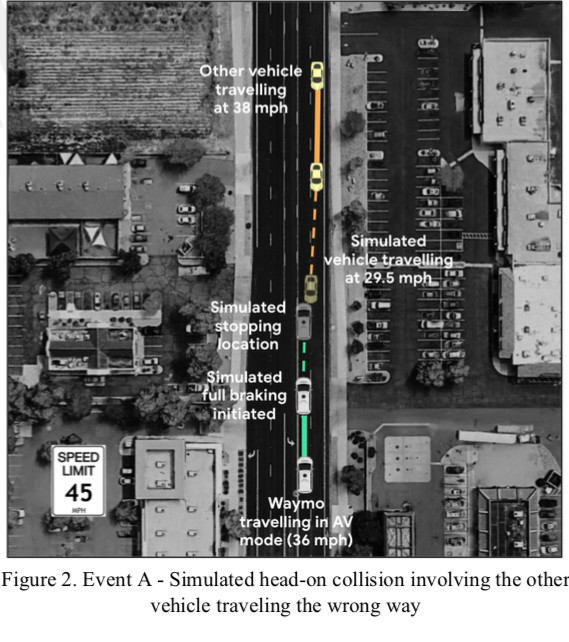
我们观察到在模拟事故中,Waymo司机检测到逆向来车,在其他车辆碰撞之前,Waymo自动驾驶汽车会启动制动措施,当其他车辆以29英里的速度行驶撞上静止的Waymo时,司机会出现明显的受损。
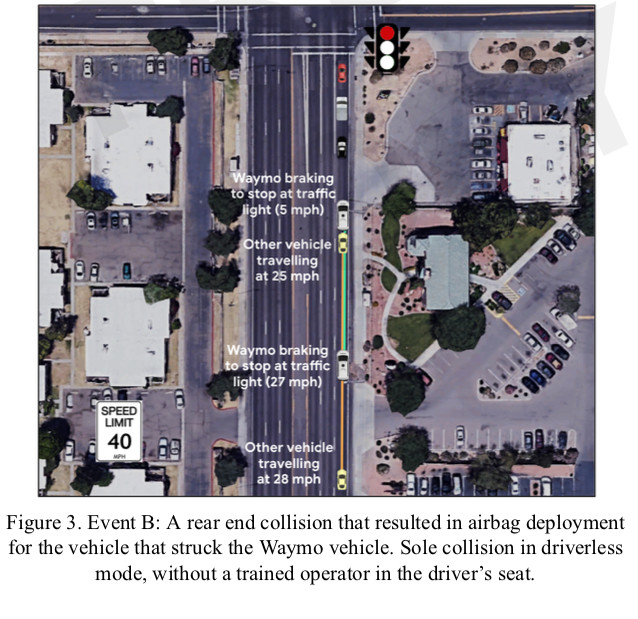
后车追尾事故:
最常见的车祸是追尾碰撞,Waymo 表示,它参与了 14 起实际的和 2 起模拟的追尾事故,除了一次例外,其他车辆都是追尾的那辆,而 Waymo 追尾其他车辆的频率其实没有普通人类驾驶员高。
在14 起实际事故中,其中6起事故是由于交通信号灯变化引起的,2起事故是由于交通状况减速而引起的,在6起追尾事故中,平均每辆追尾车速都小于6英里每小时。
此外,在右转追尾事故中,Waymo自动驾驶车辆行驶速度相对较慢,而引起事故原因在于后车的滑行导致。
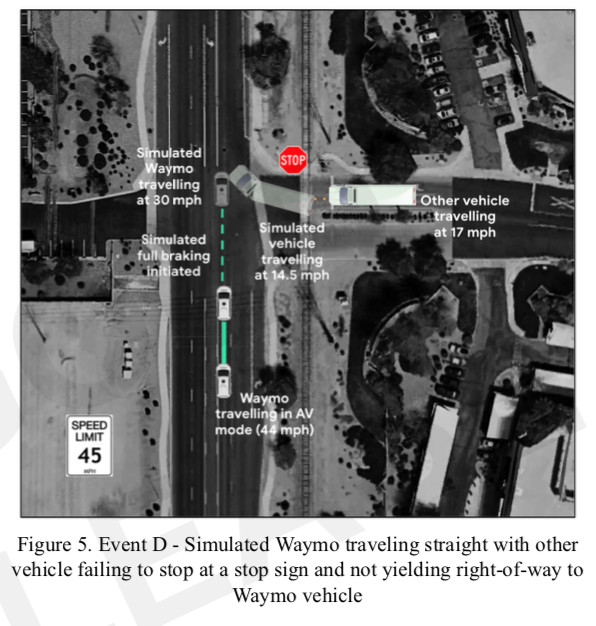
十字路口多车碰撞:
十字路口、交叉口以及转弯碰撞事故约占所有人为事故的四分之一,Waymo自动驾驶车辆参与了14次模拟事故和一次实际碰撞事故。
在10次模拟事故和一次实际碰撞事故中,Waymo车辆以限速或者低于限速行驶,而其他车辆则出现了违规交通驾驶的行为。
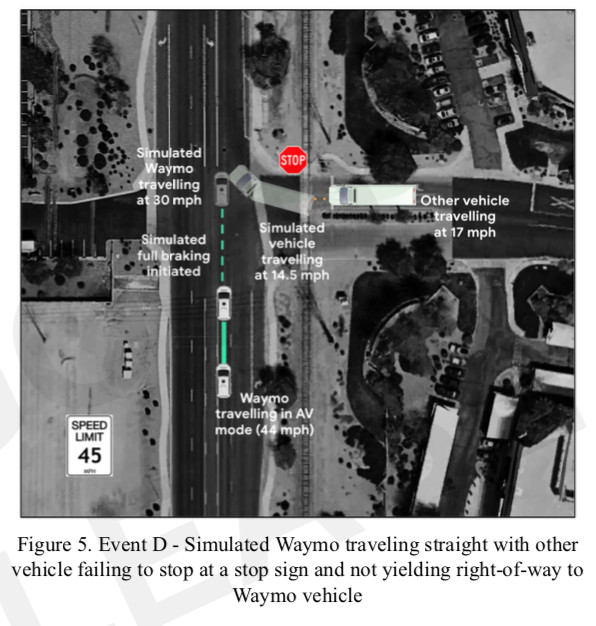
一个典型的模拟案例是,当Waymo车辆直行遇到强制右转卡车时,Waymo安全员预测到该卡车可能会进入当期Waymo车辆行驶的车道,因此采取了制动措施,使得车辆行驶速度由原来的44英里每小时降至31英里每小时,进而避免事故的发生。
对于该交通场景,Waymo的做法是不管Waymo是否具有优先通行权,为了避免碰撞,Waymo自动驾驶汽车都会主动减速避让。
模拟驾驶员视线受遮挡场景:
当Waymo自动驾驶车辆正常行驶在自行道路中,其他车辆从右边驶入主道时,在两车驾驶员视野都受到遮挡时,模拟中的Waymo车辆会进行主动减速并向左边进行变道。
左转车辆未让直行:
下面的图描绘了其他左转车辆未让正在直行的Waymo自动驾驶汽车,该情况下,Waymo车辆会在进入交叉口之前进行减速。

在发布自动驾驶汽车运营报告的同时,Waymo还更新了全新的安全框架,该安全基于交通法则以及Waymo运营经验而制定。
Waymo安全框架包括了硬件、ADS行为和运营三个基本层面:
硬件层,Waymo将自动驾驶系统(ADS)称为Waymo Driver,装有Waymo驱动程序的车辆具有四个主要子系统,这些子系统形成“硬件层”。

这包括车辆本身;用于转向和驾驶的系统;内置在车辆中的传感器套件;以及用于运行软件的计算平台。
Waymo评估Waymo Driver行为层的性能的三个主要功能:
避免与其他车辆或道路使用者发生事故。
以完全自主模式成功完成行程。
在车辆运行时遵守适用的驾驶规则。
这其中,使用一系列方法来评估这些功能,包括:
从开发过程开始就设计危害分析技术以确保Waymo Driver的坚固性。
在模拟和封闭式测试环境中基于场景的测试,以验证Waymo Driver的行为和性能。
模拟部署,以评估Waymo Driver在许多英里和各种情况下的总体性能。
最后一部分,运营反映了Waymo围绕技术构建的系统,方法和文化的重要性,以帮助确保技术安全。
Waymo的安全框架规定了Waymo几个重要运营流程的内部运作方式,车队运营包括广泛的监视和支持功能,以帮助确保Waymo Driver和车辆的安全运行。
例如,当Waymo驾驶员处理整个驾驶任务时,车队响应团队可以确认ADS所看到的内容并提供其他信息。
Waymo的风险管理计划使我们能够主动识别和解决由不断发生的技术变化引发的潜在安全问题,对潜在风险进行分类和优先排序,以便可以减轻风险。
最后,Waymo现场安全计划可帮助收集,评估和解决在实际操作中发生的潜在安全问题。
自2018年3月Uber自动驾驶首次致命事故以来,无人驾驶汽车的安全性受到了更多的审查。
当时,Uber的一辆汽车在亚利桑那州坦佩市撞死一名行人,Waymo首席执行官约翰·克拉夫奇克(John Krafcik)评论称,“他公司的车辆可以避免这种致命的碰撞。”
随着Waymo自动驾驶汽车里程的增加,其出现的交通问题也随之增多,不过,好的情况是,Waymo最严重的的交通事故源自模拟测试。
Waymo在其论文的结论中预测,“由于其他驾驶者不谨慎的行为所引发的挑战性事件都会频率清楚地提醒着人们,避免撞车是一大挑战,未来几十年,自动驾驶汽车与人类司机驾驶依然将共享道路。”
在人机共驾的面前,Waymo希望通过发布自动驾驶安全数据,推动研究人员以及其他公司开展开发通用框架的任务。
Waymo发布的《公共道路安全数据》和《安全框架》只是过去几年自动驾驶公共道路测试安全的一个缩影,可以预见的是,随着Waymo将数据对公众公布,未来,包括Argo,Aurora,Cruise,Zoox,Nuro以及其他自动驾驶公司,都会发布详细的自动驾驶汽车安全数据报告。
不过,从Waymo发生的几十次事故中也可以看出,自动驾驶汽车在人类驾驶汽车面前呈现出一个相对保持的姿态,自动驾驶汽车在遵守交通规则的基础上,依然要对人类驾驶不正当的行为进行容忍,这一问题将长时间存在。

x

-
 永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54
永不断电?这次马斯克想把你家变成“发电厂” 2021-05-08 10:54 -
 上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53
上海车展落幕,一场智能汽车逆袭传统汽车的大戏 2021-04-28 16:53 -
 左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
左手DRIVE Orin,右手DRIVE Atlan,黄仁勋靠自动驾驶芯片狂赚80亿美元 2021-04-13 16:56
-
 长安发布“天枢领航”辅助驾驶系统,启源Q06将全系搭载 2026-06-13 16:40
长安发布“天枢领航”辅助驾驶系统,启源Q06将全系搭载 2026-06-13 16:40 -
 全新深蓝S07华为乾崑激光版增程车型上市,限时15.49万元起 2026-06-13 16:53
全新深蓝S07华为乾崑激光版增程车型上市,限时15.49万元起 2026-06-13 16:53 -
 阿维塔全系亮相重庆车展,概念车VISION XPECTRA山城首秀 2026-06-13 15:42
阿维塔全系亮相重庆车展,概念车VISION XPECTRA山城首秀 2026-06-13 15:42

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
